īŻśI╠ß╣®é}ā”╬’┴„╔²╝ēĖ─įņĪó¤o╚╦░ß▀\ÖCŲ„╚╦«aŲĘ
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860





üå±R▀dīóČ■ŠS┤aī¦║ĮAGVĖ▀ą¦Ą─æ¬ė├ĄĮé}ā”ŅIė“Ż¼▓╗āHą¦┬╩Ė▀Ż¼ęĢėXą¦╣¹═¼śė═╗│÷Ż¼Įo╚╦éāĦüĒĄ─ø_ō¶╩Ū╩«Ęųš║│Ą─ĪŻį┌ć°ā╚Ż¼Žļ└¹ė├AGV╔²╝ē«aŠĆ╗“é}ÄņĄ─Įø└Ēéāę▓┐éĢ■å¢ĄĮČ■ŠS┤aī¦║ĮŻ¼┐╔─▄╩ŪėXĄ├▒╚▌^Ė▀┐Ų╝╝Ż¼▒╚▌^│▒┴„░╔ĪŻŲõīŹAGVąąśIųąĄ─Ė„ĘNī¦║ĮĘĮ╩ĮĄ─ļyČ╚Č╝▓Ņ▓╗ČÓŻ¼┤┼ī¦║ĮĪó╝ż╣Ōī¦║ĮĪóČ■ŠS┤aī¦║ĮĪóSLAMĄ╚ĘĮ╩Įī”ė┌æ¬ė├üĒšfŻ¼ø]ėą├„’@ģ^äeŻ¼ę“×ķČ╝ėą│╔╩ņĄ─é„ĖąŲ„Ę┤ü╦∙ąĶĄ─ū°ś╦Ż©ī”ė┌SLAMŻ¼┤╦ŅÉų▒ĮėĘ┤üū°ś╦Ą─é„ĖąŲ„╠ūčb¼Fį┌▀Ćø]ĄĮĘ║×EĄ─│╠Č╚Ż¼Ą½│╔╩ņķ_į┤╦ŃĘ©ęčĮøĘ║×E┴╦Ż®ĪŻÅUįÆ▓╗ČÓšfŻ¼Ž┬├µĮķĮBę╗Ž┬Č■ŠS┤aī¦║ĮAGVĄ─╗∙▒Šī¦║Į▀ē▌ŗĪŻ
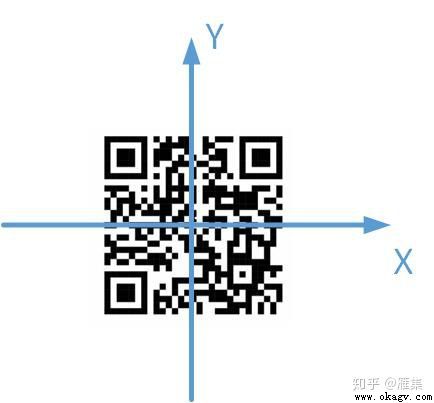
Ž┬łD╩Ūę╗éĆČ■ŠS┤a╩ŠęŌŻ¼ę╗Čč╔±╣Ē─¬£yĄ─łD░ĖŻ©┐╔ęį╩ŪČÓéĆČ■ŠS┤aśŗ│╔Ą─ĮMŻ¼ę▓┐╔ęį╩Ūūį╝║Č©┴xĄ─Ż¼ų╗ę¬─▄ĮŌ╬÷Š═ąąŻ®ļ[▓žų°ū°ś╦ą┼ŽóĪŻé„ĖąŲ„Ż©özŽ±Ņ^╝ė╠Ä└ĒŲ„Ż®ūx╚ĪĄĮČ■ŠS┤aĢrŻ¼▌ö│÷é„ĖąŲ„ųąą─┼cČ■ŠS┤aųąą─Ą─ŠÓļx║═ę╗éĆŲ½▐DĮŪČ╚Ż¼ŠÓļxųĄėąš²žōų«ĘųŻ¼┐╔┐┐ĘČć·ę╗░Ń▓╗│¼▀^Ī└4cmŻ¼«ö╚╗│¼▀^▀@éĆĘČć·ę▓Ģ■ėąöĄųĄĘĄ╗žŻ©ĘĮ▒Ń│§┤╬īżČ■ŠS┤aŻ®Ż¼Ą½╚ń╣¹AGVĄ─ī¦║Įš`▓Ņ┐žųŲ│¼▀^┴╦4cmŻ¼─ŪŠ═▓╗ė├═µ┴╦ĪŻĖ∙ō■Ę┤üĄ─Ų½▓ŅųĄŻ¼Š═┐╔ęįī”AGV▀Mąą╝mŲ½ĪŻ
¼Fį┌å¢Ņ}üĒ┴╦Ż¼å¢Ņ}ę╗Ż║į┌Č■ŠS┤aų«ķgĄ─┐š░ūģ^ė“ø]ėąģó┐╝ą┼ŽóŻ¼Ė∙ō■╩▓├┤╝mŲ½Ż┐
╩ūŽ╚─▄ŽļĄĮĄ─╩Ū└¹ė├║Į█E═Ų╦ŃĄ─ĘĮĘ©Ż¼Ė∙ō■┐žųŲĮoČ©ųĖ┴Ņ╗“ŠÄ┤aŲ„öĄųĄ═Ų╦ŃAGVĄ─╬╗ų├Ż¼Å─Č°▀Mąą╝mŲ½ĪŻ
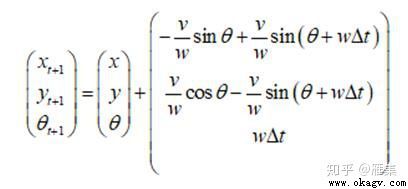
īŹļH┐žųŲųąŻ¼ė├ŠÄ┤aŲ„═Ų╦ŃĄ─Š½Č╚ę╗░ŃĢ■Ė▀ė┌Ė∙ō■┐žųŲĮoČ©ųĖ┴ŅĄ─═Ų╦ŃĮY╣¹Ż¼ę“×ķ┐žųŲŲ„║═ł╠ąąÖCśŗĄ─Ēææ¬║═ł╠ąąŪķør▓╗╚▌ęū£╩┤_čaāöĪŻį┌┤╦Ż¼╩«Ęų═Ų╦]╩╣ė├ĪČProbabilistic RoboticsĪĘ(page 127)ųą├Ķ╩÷Ą──Żą═Ż¼įō─Żą═║åå╬┤ų▒®Ż¼▓╗āHę“×ķ▄ć¾wųąą─Ą─╦┘Č╚┼cĮŪ╦┘Č╚Ą╚ģóöĄ╚▌ęūėŗ╦ŃŻ¼▓óŪę─Żą═ųąų▒Įėæ¬ė├Ą─╩Ū╚½Šųū°ś╦Ż¼▓╗ė├į┘▀Mąąū°ś╦▐DōQ┴╦Ż¼┐éų«Ż¼║åå╬┤ų▒®ĪŻ
└¹ė├║Į█E═Ų╦ŃĄ─ĘĮĘ©┐éĢ■ėąš`▓Ņ┤µį┌Ż¼▓óŪęę“×ķø]ėąģó┐╝Ż¼įōš`▓Ņ└Ēšō╔Ž╩Ū¤o▀ģĮńĄ─Ż¼─Ū├┤Ż¼å¢Ņ}Č■Ż║╚ń║╬£pąĪ═Ų╦Ńš`▓ŅŻ┐
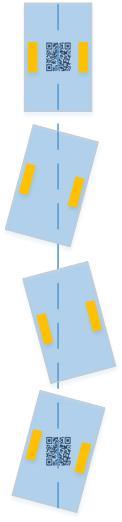
ę╗░Ń═©▀^ā╔ĘN╩ųČ╬Ż¼ę╗╩Ū┐sČ╠Č■ŠS┤aų«ķgĄ─ŠÓļxŻ¼▀@śėŠ═£pąĪ┴╦═Ų╦Ńš`▓Ņ└█╝ėĄ─ĢrķgŻ¼Å─Č°£pąĪ┴╦═Ų╦Ńš`▓ŅĪŻĄ½▀@śėū÷Ģ■į÷┤¾Č■ŠS┤aõüįOĄ─╣żū„┴┐Ż¼▓óŪęĢ■╩╣¼Fł÷Ė³╝ėÅ═ļsĪŻ«ö╚╗Ż¼įōĘĮĘ©īŹ╩®Ą─Ū░╠ß╩Ū╩®╣ż╚╦åTą─Ūķėõ┐ņĄ─Įė╩▄▓óŪę╣żÅSĘĮ═¼ęŌ─Ń▀@śėū÷ĪŻ
Č■╩Ūį÷╝ėæTī¦Ż¼└¹ė├é„ĖąŲ„╚┌║ŽĄ─ĘĮĘ©£pąĪ═Ų╦Ńš`▓ŅĪŻīŹļH╔ŽŻ¼¼Fį┌╩ą╩█Ą─æTī¦ārĖ±Č╝▒╚▌^Ą═Ż¼ų«╦∙ęį▒Ńę╦Ż¼ę“×ķĄ═Č╦Ą─æTī¦ęčĮø▒╗═µĀĆ┴╦Ż¼Github╔Ž┐╔ęįŽ┬▌dĄĮpixhawkĪócrazyponyĄ╚īŹ¼FæTī¦╦ŃĘ©Ą─┤·┤aŻ©ššū÷Īóšš│ŁŻ¼Š═┐╔ęįūį╝║ū÷│÷æTī¦┴╦Ż®Ż¼▀xę╗┐ŅŪ¦į¬ęįŽ┬Ą─«aŲĘę╗░Ń┐╔ęįØMūŃ╩╣ė├ę¬Ū¾ĪŻ╗∙▒ŠĄ─æTī¦ėą9éĆ▌ö│÷Ż¼Ęųäe╩Ūčž╚²éĆ▌SŽ“Ą─╝ė╦┘Č╚┼c└@╚²éĆ▌SĄ─ĮŪ╦┘Č╚Ż¼ęį╔Ž6éĆ╩ŪąŠŲ¼Ę┤üĄ─įŁ╩╝öĄō■Ż¼▀Ćėą3éĆÜW└ŁĮŪČ╚╩ŪæTī¦╚┌║Žėŗ╦Ń║¾Ą─▌ö│÷öĄō■ĪŻAGVų„ę¬╩Ūæ¬ė├æTī¦Ą─║ĮŽ“ĮŪ▌ö│÷ųĄŻ¼╦∙ęįā׎╚▀xō±Ä¦ėą┤┼śOĖąæ¬Ą─æTī¦╗“š▀ų▒Įė▀xō±Ė▀Š½Č╚Ą─║ĮŽ“ĮŪé„ĖąŲ„Ż©ėą╚╦Įą╦³═ė┬▌▐DĮŪāxŻ®ĪŻ┤┼Ėąæ¬Ą─Ēææ¬▌^┬²Ż¼▓óŪęėą┴Ń³cŲ»ęŲŪķørŻ¼─▄ʱæ¬ė├ę¬┐┤¼Fł÷Ą─ŪķørŻ¼ų╗└¹ė├└@z▌SĄ─ĮŪ╦┘Č╚ū÷ĘeĘųę▓╩Ū┐╔ęįĄ├ĄĮ║▄║├Ą─ĮY╣¹Ą─Ż©▓╗ę¬┤ų▒®Ą─ų▒Įė└█╝ėŻ¼ų┴╔┘ę¬ė├ę╗Ž┬²łĖńÄņ╦■Ę©ų«ŅÉĄ─ėąŽ¹│²Üł▓ŅÖCųŲĄ─öĄųĄĘeĘųĘĮĘ©Ż®ĪŻĄ├ĄĮģó┐╝ĮŪČ╚ųĄ║¾Ż¼┼c╗∙ė┌ŠÄ┤aŲ„Ą├ĄĮĄ─║Į█E═Ų╦ŃųĄū÷╚┌║ŽŻ¼║åå╬³cĄ─Ż¼ė├╗źča×V▓©ū÷╚┌║ŽŠ═┐╔ęįĄ├ĄĮ▌^║├Ą─ĮY╣¹Ż¼╚ń╣¹▓╗Žė┬ķ¤®Ż¼┐╔ęįš█“vę╗Ž┬EKFŻ©į┌stm32┐“╝▄Ž┬š█“vEKFę¬ū÷║├ę╗Č©£╩éõŻ¼ėŁĮėĮŌŠžĻćĦüĒĄ─┬ķ¤®Ż®ĪŻ
¼Fį┌ėą┴╦Č■ŠS┤aų«ķg┐š░ūģ^ė“Ą─═Ų╦ŃöĄō■Ż¼Š═┐╔ęįū÷┐žųŲ┴╦ĪŻĄ½═Ų╦ŃĄ─öĄō■╚į╚╗Ģ■ėąš`▓ŅĄ─Ż¼Č°«öAGVąą±éĄĮČ■ŠS┤aģ^ė“╔ŽĢrŻ¼Ą├ĄĮĄ─╩Ū£╩┤_Ą─║Į╬╗š`▓ŅĪŻå¢Ņ}╚²Ż║į┌┐š░ūģ^┼cį┌Č■ŠS┤a╔Žė├═¼śėĄ─┐žųŲģóöĄ┐žųŲĢ■«a╔·ČČäė╗“╠°ūāå߯┐═©▀^ęį╔ŽĄ─£pąĪš`▓ŅĄ─ĘĮ░ĖŻ¼ęčĮø╩╣═Ų╦Ńš`▓Ņ£pąĪ┴╦Ż©ė├ą─š{į毮Ż¼▓óŪęė╔ė┌┐žųŲŲ„▀\╦Ń┼cł╠ąąÖCśŗĒææ¬čėĢrĄ─å¢Ņ}Ż¼ė├═¼ę╗ĮM┐žųŲģóöĄ▓ó▓╗Ģ■įņ│╔AGVį┌▓╗═¼ģ^ė“ŃĢĮė╠ÄĄ─├„’@ČČäėŻ¼┐╔ęįĘ┼ą─┤¾─æĄ─æ¬ė├ĪŻ╚ń╣¹Žļį┌įŁ└Ē╔ŽČ┼Į^ČČäėŻ¼┐╔ęįćLįć└¹ė├▓ÕųĄ╗“┬ĘÅĮŲź┼õĄ─ĘĮĘ©Ż¼«a╔·ŲĮ╗¼Ą─┬ĘÅĮŻ¼ė├┐žųŲĘĮĘ©Ė·█Ö▀@ŚlŲĮ╗¼Ą─┬ĘÅĮĪŻ
╔Žę╗ŚlŻ║AGVūįäė│õļŖįŁ└Ēšf├„ Ž┬ę╗ŚlŻ║AGV░▓╚½╣╩šŽå¢Ņ}ģR┐é
ļŖįÆŻ║0755-29851810
é„šµŻ║0755-27307147
Q QŻ║2448209188
Ó]ŽõŻ║zfj@okagv.com
ĄžųĘŻ║╔Ņ█┌╩ąīÜ░▓ģ^ĖŻ║ŻĮųĄ└┤¾č¾┬Ęųą╝ZĖŻ░▓ÖCŲ„╚╦┐Ų╝╝ł@14ŚØ

Copyright © 2012-2023 ╔Ņ█┌╩ąÜWµzųŪ─▄ÖCŲ„╚╦╣╔Ę▌ėąŽ▐╣½╦Š ░µÖÓ╦∙ėąĪĪ ╗øICPéõ 19115608 ╠¢ĪĪxml sitemap
┬ōŽĄļŖįÆ
400-007-3860QQū╔įā
2448209188╬óą┼
╬óą┼ū╔įā