īŻśI╠ß╣®é}ā”╬’┴„╔²╝ēĖ─įņĪó¤o╚╦░ß▀\ÖCŲ„╚╦«aŲĘ
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860





║╦ą─š¬ę¬Ż║AGV╚ń║╬īŹ¼F▐DŽ““īäėŻ┐ėą──ą®▐DŽ““īäėŅÉą═Ż┐īŹ¼FAGVĖ▀ą¦Š½£╩Ą─▀\ąąŻ¼ļx▓╗ķ_ī¦║ĮŽĄĮy║═▐DŽ““īäėŽĄĮyĄ─═©┴”ģfū„ĪŻAGVį┌╚š│Ż▀\▌ö▀^│╠ųąąĶę¬ė├▐DŽ““īäėčbų├üĒ┐žųŲ▀\äėĘĮ╩ĮĪŻ▓╗═¼...
AGV╚ń║╬īŹ¼F▐DŽ““īäėŻ┐
ėą──ą®▐DŽ““īäėŅÉą═Ż┐
Ż©ęĢŅlųŲū„LogTVŻ¼▐D▌däš▒žūó├„üĒį┤ŻĪŻ®
īŹ¼FAGVĖ▀ą¦Š½£╩Ą─▀\ąąŻ¼ļx▓╗ķ_ī¦║ĮŽĄĮy║═▐DŽ““īäėŽĄĮyĄ─═©┴”ģfū„ĪŻAGVį┌╚š│Ż▀\▌ö▀^│╠ųąąĶę¬ė├▐DŽ““īäėčbų├üĒ┐žųŲ▀\äėĘĮ╩ĮĪŻ▓╗═¼Ą─▄ć▌åĮYśŗ║═▓╝Šųėąų°▓╗═¼Ą─▐DŽ“║═┐žųŲĘĮ╩ĮŻ¼Ųõ│ąųž─▄┴”Īó▀\ąąŠ½Č╚Īóņ`╗ŅąįĄ╚ę▓▓╗▒MŽÓ═¼Ż¼ī”▀\ąąĄž├µŁhŠ│ę▓ėą▓╗═¼Ą─ę¬Ū¾ĪŻ─Ū├┤Ż¼▓╗═¼Ą─▐DŽ““īäėčbų├▀mė├ė┌╩▓├┤æ¬ė├ł÷Š░Ż┐ėųėą──ą®ā×╚▒³c─žŻ┐Ž┬├µąĪŠÄŠ═Įo┤¾╝ęĮķĮBę╗ą®│ŻęŖĄ─▐DŽ““īäėŅÉą═ĪŻ
logclub
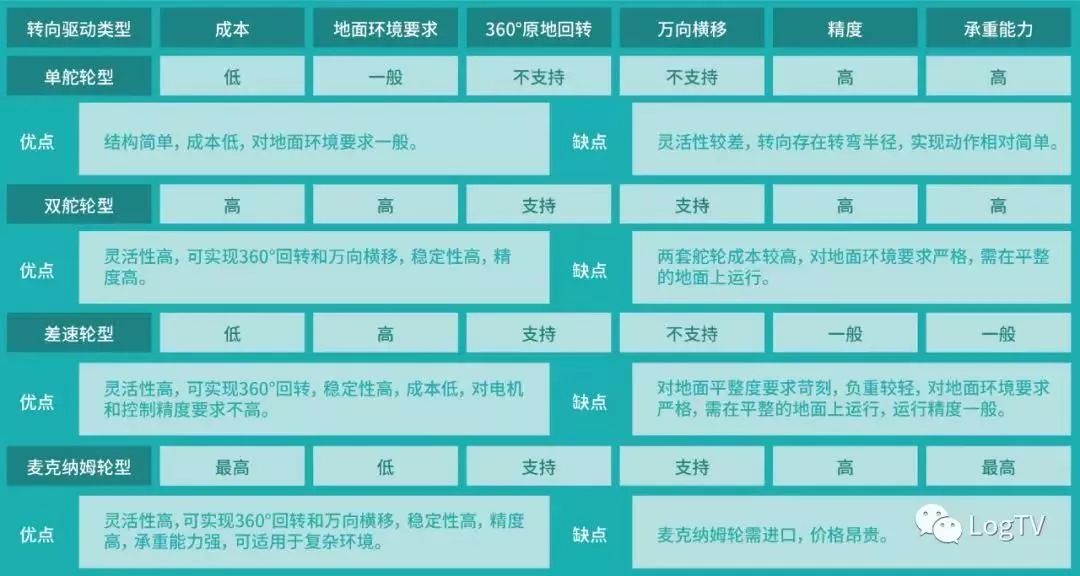
│ŻęŖĄ─AGV▐DŽ““īäėŅÉą═
1Īóå╬ȵ▌åą═
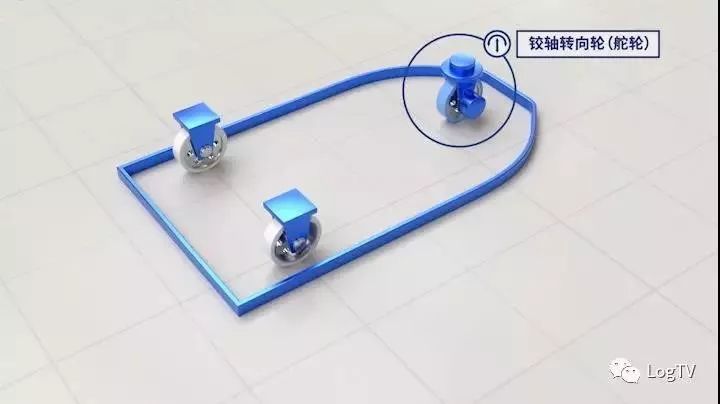
å╬ȵ▌åą═AGVČÓ×ķ╚²▌å▄ćą═Ż©▓┐ĘųAGV×ķ┴╦Ė³ÅŖĄ─ĘĆČ©ąįĢ■░▓čbČÓéĆļSäė▌åŻ¼Ą½▐DŽ““īäėčbų├āH×ķę╗éĆȵ▌åŻ®Ż¼ų„ę¬╩Ūę└┐┐AGVŪ░▓┐Ą─ę╗éĆŃq▌S▐DŽ“▄ć▌åū„×ķ“īäė▌åŻ¼┤Ņ┼õ║¾ā╔éĆļSäė▌åŻ¼ė╔Ū░▌å┐žųŲ▐DŽ“ĪŻå╬ȵ▌å▐DŽ““īäėĄ─ā׳c╩ŪĮYśŗ║åå╬Īó│╔▒ŠĄ═Ż¼ė╔ė┌╩Ūå╬▌å“īäėŻ¼¤oąĶ┐╝æ]ļŖÖC┼õ║Žå¢Ņ}Ż¼ę“╚²▌åĮYśŗĄ─ūźĄžąį║├Ż¼ī”Ąž▒Ē├µę¬Ū¾ę╗░ŃŻ¼▀mė├ė┌ÅVĘ║Ą─ŁhŠ│║═ł÷║ŽĪŻ╚▒³c╩Ūņ`╗Ņąį▌^▓ŅŻ¼▐DŽ“┤µį┌▐DÅØ░ļÅĮŻ¼─▄īŹ¼FĄ─äėū„ŽÓī”║åå╬ĪŻ
▀mė├AGVŅÉą═Ż║Ā┐ę²╩ĮAGVĪó▓µ▄ć╩ĮAGVĪŻ
▀mė├ł÷Š░Ż║┤¾ćŹ╬╗žø╬’░ß▀\Ż¼▀mė├ł÷Š░ÅVĘ║ĪŻ
2Īóļpȵ▌åą═
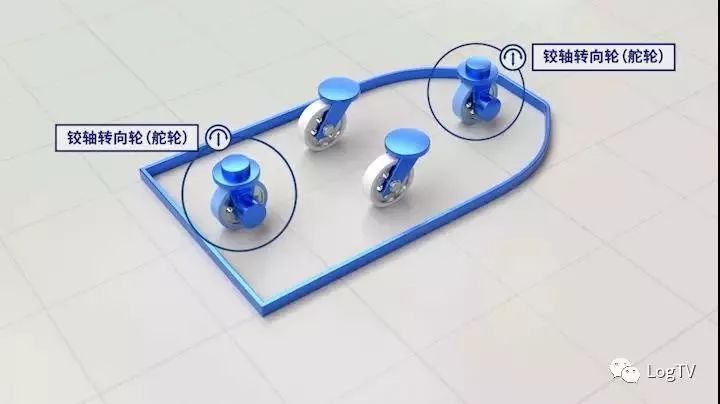
ļpȵ▌åą═AGV×ķ╚fŽ“ą═AGVŻ¼▄ć¾wŪ░║¾Ė„░▓čbę╗éĆȵ▌åŻ¼┤Ņ┼õū¾ėęā╔é╚Ą─ļSäė▌åŻ¼ė╔Ū░║¾Čµ▌å┐žųŲ▐DŽ“ĪŻļpȵ▌åą═▐DŽ““īäėĄ─ā׳c╩Ū┐╔ęįīŹ¼F360ĪŃ╗ž▐D╣”─▄Ż¼ę▓┐╔ęįīŹ¼F╚fŽ“ÖMęŲŻ¼ņ`╗ŅąįĖ▀ŪęŠ▀ėąŠ½┤_Ą─▀\ąąŠ½Č╚ĪŻ╚▒³c╩Ūā╔╠ūȵ▌å│╔▒Š▌^Ė▀Ż¼Č°ŪęAGV▀\ąąųąĮø│ŻąĶę¬ā╔éĆȵ▌å▓ŅäėŻ¼▀@ī”ļŖÖC║═┐žųŲŠ½Č╚ę¬Ū¾▌^Ė▀Ż¼Č°Ūęę“×ķ╦─▌å╗“ęį╔ŽĄ─▄ć▌åĮYśŗŻ¼╚▌ęūī¦ų┬ę╗▌åæę┐šČ°ė░Ēæ▀\ąąŻ¼╦∙ęįī”Ąž├µŲĮš¹Č╚ę¬Ū¾ć└Ė±ĪŻĄ½╩Ūė╔ė┌Ąū▓┐▌åūėĖ³ČÓŻ¼╩▄┴”Ė³Š∙║ŌŻ¼╦∙ęį▀@ĘN“īäėĘĮ╩ĮĄ─ĘĆČ©ąį▒╚å╬ȵ▌åą═AGVĖ³Ė▀ĪŻ
▀mė├AGVŅÉą═Ż║ųž▌dØōĘ³╩ĮAGV╗“═Ż▄ćÖCŲ„╚╦ĪŻ
▀mė├ł÷Š░Ż║┤¾ćŹ╬╗Ą─╬’┴Ž░ß▀\Ż¼▀mė├ė┌Ų¹▄ćųŲįņ╣żÅSĪó═Ż▄ćł÷Ą╚ł÷Š░ĪŻ
3Īó▓Ņ╦┘▌åą═
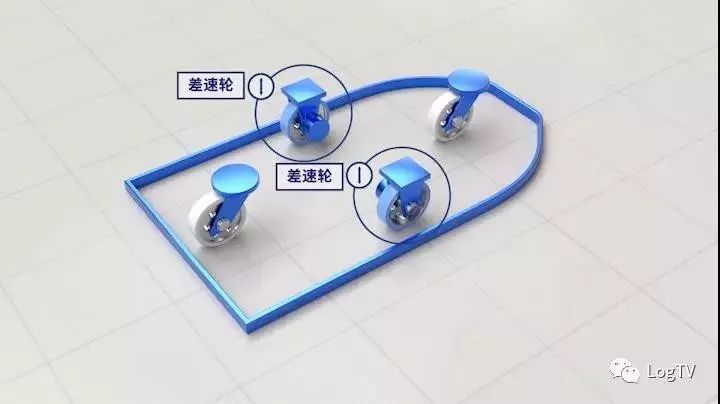
▓Ņ╦┘▌åą═AGVĄ─ĮYśŗ╩Ū▄ć¾wū¾ėęā╔é╚░▓čb▓Ņ╦┘▌åū„×ķ“īäė▌åŻ¼Ųõ╦¹×ķļSäė▌åŻ¼┼cļpȵ▌åą═▓╗═¼Ą─╩ŪŻ¼▓Ņ╦┘▌å▓╗┼õų├▐DŽ“ļŖÖCŻ¼ę▓Š═╩Ūšf“īäė▌å▒Š╔Ē▓ó▓╗─▄ą²▐DŻ¼Č°╩Ū═Ļ╚½┐┐ā╚═Ō“īäė▌åų«ķgĄ─╦┘Č╚▓ŅüĒīŹ¼F▐DŽ“ĪŻ▀@ĘN“īäėĘĮ╩ĮĄ─ā׳c╩Ūņ`╗ŅąįĖ▀Ż¼═¼śė┐╔īŹ¼F360ĪŃ╗ž▐DŻ¼Ą½ė╔ė┌▓Ņ╦┘▌å▒Š╔Ē▓╗Š▀éõ▐DŽ“ąįŻ¼╦∙ęį▀@ĘN“īäėŅÉą═Ą─AGV¤oĘ©ū÷ĄĮ╚fŽ“ÖMęŲĪŻ┤╦═ŌŻ¼▓Ņ╦┘▌åī”ļŖÖC║═┐žųŲŠ½Č╚ę¬Ū¾▓╗Ė▀Ż¼ę“Č°│╔▒ŠŽÓī”Ą═┴«Ż¼Č°╚▒³c╩Ū▓Ņ╦┘▌åī”Ąž├µŲĮš¹Č╚ę¬Ū¾┐┴┐╠Ż¼žōųž▌^▌pŻ¼ę╗░Ńžō▌dį┌1ćŹęįŽ┬Ż¼¤oĘ©▀m權½Č╚ę¬Ū¾▀^Ė▀Ą─ł÷║ŽĪŻ┤¾╝ę╩ņŽżĄ─üå±R▀dKIVAÖCŲ„╚╦Š═╩Ū╩╣ė├▓Ņ╦┘▌å▐DŽ““īäėĘĮ╩ĮĪŻ
▀mė├AGVŅÉą═Ż║ØōĘ³╩ĮAGVĪŻ
▀mė├ł÷Š░Ż║▀mė├ė┌ŁhŠ│▌^║├Ą─ļŖ╔╠Īó┴Ń╩█Ą╚é}Äņł÷Š░ĪŻ
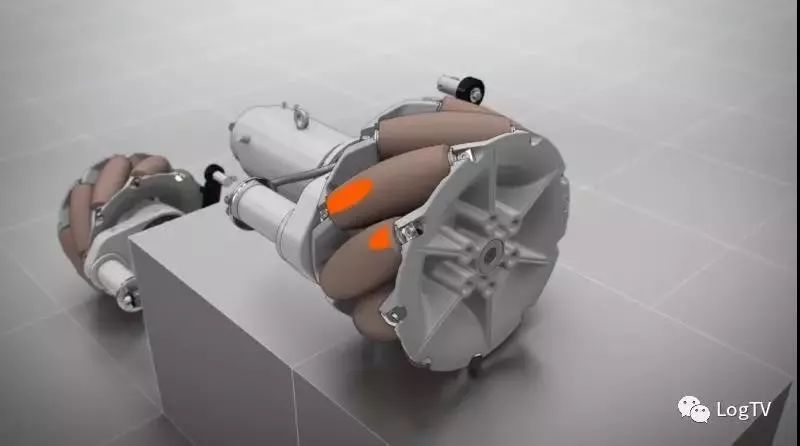
4Īó¹£┐╦╝{─Ę▌åą═
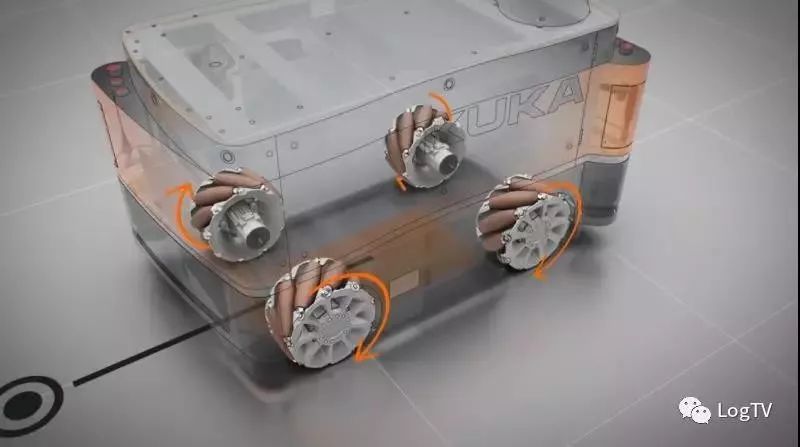
¹£┐╦╝{─Ę▌åįOėŗą┬ĘfŻ¼▀@ĘN╚½ĘĮ╬╗ęŲäėĘĮ╩Į╩Ū╗∙ė┌ę╗éĆėąįSČÓ╬╗ė┌ÖC▌åų▄▀ģĄ─▌å▌SĄ─ųąą─▌åĄ─įŁ└Ē╔ŽŻ¼▀@ą®│╔ĮŪČ╚Ą─ų▄▀ģ▌å▌S░čę╗▓┐ĘųĄ─ÖC▌å▐DŽ“┴”▐D╗»ĄĮę╗éĆÖC▌åĘ©Ž“┴”╔Ž├µĪŻę└┐┐Ė„ūįÖC▌åĄ─ĘĮŽ“║═╦┘Č╚Ż¼▀@ą®┴”Ą─ūŅĮK║Ž│╔į┌╚╬║╬ę¬Ū¾Ą─ĘĮŽ“╔Ž«a╔·ę╗éĆ║Ž┴”╩Ė┴┐Å─Č°▒ŻūC┴╦▀@éĆŲĮ┼_į┌ūŅĮKĄ─║Ž┴”╩Ė┴┐Ą─ĘĮŽ“╔Ž─▄ūįė╔ĄžęŲäėŻ¼Č°▓╗Ė─ūāÖC▌åūį╔ĒĄ─ĘĮŽ“ĪŻ║åå╬üĒšfŻ¼Š═╩Ūį┌▌å▌×╔Ž░▓čbą▒Ž“▌üūėŻ¼═©▀^ģf═¼▀\äėęįīŹ¼FęŲäė╗“ą²▐DĪŻ¹£┐╦╝{─Ę▌åĄ─ā׳c╩ŪŠ▀ėą10ćŹęį╔ŽĄ─▌dųž─▄┴”Ż¼ņ`╗ŅąįĖ▀Ż¼┐╔ęįīŹ¼F360ĪŃ╗ž▐D╣”─▄║═╚fŽ“ÖMęŲŻ¼Ė³▀m║Žį┌Å═ļsĄžą╬╔ŽĄ─▀\äėĪŻ╚▒³c╩Ū¹£┐╦╝{─Ę▌åī┘ė┌╚Ąõ¹£┐╦╝{─Ę╣½╦ŠĄ─īŻ└¹Ż¼ų╗─▄Å─ć°═Ō▀M┐┌Ż¼į┘╝ė╔Ž▒Š╔Ē▀\äėŅÉą═Ą─Å═ļsąįŻ¼ę“┤╦ārĖ±░║┘FĪŻ
▀mė├AGVŅÉą═Ż║ųž▌dą═ęŲäėŲĮ┼_Īóæ¶═ŌęŲäėÖCŲ„╚╦
▀mė├ł÷Š░Ż║’wÖCĪóĖ▀ĶFĄ╚╔·«aųŲįņł÷Š░Īóæ¶═ŌÖCŲ„╚╦▀\▌öł÷Š░ĪŻ
▓╗═¼Ą─▐DŽ““īäėŅÉą═ī”æ¬ų°▓╗═¼ł÷Š░Ž┬Ą─æ¬ė├ąĶŪ¾Ż¼ąĶę¬Ė∙ō■ŁhŠ│Īóžō▌dĄ╚ę“╦ž▀MąąŠC║Žįu╣└▀xČ©ĪŻĖ∙ō■æ¬ė├ł÷Š░Ą─ŁhŠ│ąĶ꬯¼▀xė├ūŅ║Ž▀mĄ─▐DŽ““īäėĘĮ╩ĮŻ¼ų╗ėą▀@śė▓┼─▄▒ŻūC▓╗═¼ū„śIł÷Š░Ž┬AGV▀\ąąĄ─┐╔┐┐ąįĪóĘĆČ©ąį║═Š½┤_ąįĪŻ
╔Žę╗ŚlŻ║AGVąĪ▄ć╝ż╣Ōī¦║Į╣żū„įŁ└Ēā×╚▒³c Ž┬ę╗ŚlŻ║AGVąĪ▄ćĄ─╚š│Ż▒ŻB┴„│╠║═ūóęŌ╩┬ĒŚ
ļŖįÆŻ║0755-29851810
é„šµŻ║0755-27307147
Q QŻ║2448209188
Ó]ŽõŻ║zfj@okagv.com
ĄžųĘŻ║╔Ņ█┌╩ąīÜ░▓ģ^ĖŻ║ŻĮųĄ└┤¾č¾┬Ęųą╝ZĖŻ░▓ÖCŲ„╚╦┐Ų╝╝ł@14ŚØ

Copyright © 2012-2023 ╔Ņ█┌╩ąÜWµzųŪ─▄ÖCŲ„╚╦╣╔Ę▌ėąŽ▐╣½╦Š ░µÖÓ╦∙ėąĪĪ ╗øICPéõ 19115608 ╠¢ĪĪxml sitemap
┬ōŽĄļŖįÆ
400-007-3860QQū╔įā
2448209188╬óą┼
╬óą┼ū╔įā