ÜgėŁ▀M╚ļ╔Ņ█┌╩ąÜWµzųŪ─▄ÖCŲ„╚╦╣╔Ę▌ėąŽ▐╣½╦ŠŠW(w©Żng)šŠŻĪ
īŻśI(y©©)╠ß╣®é}ā”╬’┴„╔²╝ēĖ─įņĪó¤o╚╦░ß▀\ÖCŲ„╚╦«a(ch©Żn)ŲĘ
ę╗╝ęīŻūóÅ═(f©┤)║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░l(f©Ī)ųŲįņć°╝ęĖ▀ą┬╝╝ąg(sh©┤)Ų¾śI(y©©)
╚½ć°Ę■äš(w©┤)¤ßŠĆ 400-007-3860
ę╗╝ęīŻūóÅ═(f©┤)║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░l(f©Ī)ųŲįņć°╝ęĖ▀ą┬╝╝ąg(sh©┤)Ų¾śI(y©©)
╚½ć°Ę■äš(w©┤)¤ßŠĆ 400-007-3860

║ŽÖCŲ„╚╦")



ųŪ─▄╣żÅS╩ŪīŹ¼F(xi©żn)ųŪ─▄ųŲįņĄ─ĻP(gu©Īn)µIŁh(hu©ón)╣Ø(ji©”)ĪŻį┌ųŪ─▄╣żÅSųąŻ¼ųŪ─▄įO(sh©©)éõĄ├ĄĮ┴╦ÅVĘ║Ą─æ¬(y©®ng)ė├Ż¼AGVĪóųŪ─▄ÖCąĄ╩ųĄ╚ųŪ─▄░ß▀\įO(sh©©)éõĮM│╔┴╦ųŪ─▄╔·«a(ch©Żn)╬’┴ŽŽĄĮy(t©»ng)ĪŻČÓ░ß▀\▌d¾wķgĄ─ģf(xi©”)═¼ū„śI(y©©)ī”ųŪ─▄╣żÅSĄ─š²│Ż▀\▐D(zhu©Żn)Š▀ėą╩«Ęųųžę¬Ą─ęŌ┴xĪŻĮ³─ĻüĒŻ¼ČÓ░ß▀\▌d¾wķgĄ─ģf(xi©”)═¼ū„śI(y©©)čąÕ││╔×ķ╬’┴„ŅI(l©½ng)ė“Ą─ĻP(gu©Īn)ūó¤ß³cŻ¼ć°ā╚(n©©i)═ŌīW(xu©”)š▀ßśī”ģf(xi©”)═¼å¢Ņ}ķ_š╣┴╦┤¾┴┐蹊┐ĪŻ
į┌░ß▀\▌d¾wģf(xi©”)═¼čąÕ│ĘĮ├µŻ¼ĻÉ├¶Ą╚[1]ßśī”ųŪ─▄▄ćķgųąČÓAGVĄ─š{(di©żo)Č╚å¢Ņ}▀MąąčąÕ│Ż¼╠ß│÷7éĆš{(di©żo)Č╚▀\ąąÖCųŲŻ¼═©▀^▀\ė├PlantSimulationī”▀MąąĘ┬šµŻ¼“×ūCš{(di©żo)Č╚ĘĮ░ĖĄ─║Ž└ĒąįĪŻ┘RķLš„Ą╚[2]ßśī”╚ßąįųŲįņ▄ćķgųąAGV║═╝ė╣żįO(sh©©)Ė„Ą─ģf(xi©”)═¼š{(di©żo)Č╚å¢Ņ}Ż¼Į©┴óļp┘Yį┤ā×(y©Łu)╗»öĄ(sh©┤)īW(xu©”)─Żą═Ż¼įO(sh©©)ėŗ┴╦Ī░Ģrķg┤░+Dijkstra+▀zé„╦ŃĘ©Ą─╗ņ║Ž╦ŃĘ©▀MąąŪ¾ĮŌŻ¼▓ó▓╔ė├┴╦3ĘNęÄ(gu©®)ätĮŌøQūŅā×(y©Łu)┬ĘÅĮęÄ(gu©®)äØųąĄ─ø_═╗å¢Ņ}ĪŻä󹱥╚[3]Į©┴óęįAGV╣żū„▀^│╠ųąąą±éĢrķgūŅČ╠Ą─öĄ(sh©┤)īW(xu©”)ā×(y©Łu)╗»─Żą═Ż¼ī”▀zé„╦ŃĘ©Ą─Į╗▓µūā«É╦ŃūėĖ─▀MŻ¼Ū¾ĮŌ½@╚ĪČÓAGVģf(xi©”)═¼š{(di©żo)Č╚Ą─ūŅ╝čĘĮ░ĖĪŻį└ą”═╣Ą╚čąÕ│├µŽ“╚ßąįųŲįņŽĄĮy(t©»ng)ųąČÓūįäėĀ┐ę²ąĪ▄ćĄ─ģf(xi©”)═¼š{(di©żo)Č╚å¢Ņ}Ż¼┐╝æ]ąĪ▄ćĄ─└m(x©┤)║Į─▄┴”ę“╦žŻ¼ęį╚╬äš(w©┤)Ą─ūŅąĪ═Ļ│╔Ģrķg║═▄ć▌vöĄ(sh©┤)ūŅ╔┘╩╣ė├┴┐×ķš{(di©żo)Č╚─┐ś╦Ż¼▓╔ė├╗ņ║Ž▀zé„ę╗┴Żūė╚║╦ŃĘ©▀MąąŪ¾ĮŌŻ¼▓ó═©▀^Ę┬šµ“×ūC─Żą═║═╦ŃĘ©ėąą¦ąįĪŻAbdelmaguidTFĄ╚[5]蹊┐╝ė╣żįO(sh©©)éõ║═ČÓAGVļp┘Yį┤ķgĄ─ģf(xi©”)═¼ā×(y©Łu)╗»Ż¼ęįūŅ┤¾╚╬äš(w©┤)ĮY(ji©”)╩°Ģrķg×ķā×(y©Łu)╗»─┐ś╦Ż¼╠ß│÷ę╗ĘNą┬Ą─╗ņ║Ž▀zé„╦ŃĘ©ŠÄ┤aĘĮ░Ė▀MąąŪ¾ĮŌŻ¼═©▀^82ĮMīŹ“×╦Ń└²Ż¼“×ūC─Żą═║═ŠÄ┤aĘĮ░ĖĄ─ąį─▄ā×(y©Łu)┴ėąįĪŻ
į┌┬Ę┐┌▒▄┼÷蹊┐ĘĮ├µŻ¼║·Į▄Į▄[6]ßśī”ųŪ─▄▄ćķg╚ßąį╬’└ĒŻ¼įO(sh©©)ėŗ┴╦╝»ųą╩ĮĄ─AGV╚║┐žģf(xi©”)š{(di©żo)╦ŃĘ©Ż¼┘xėĶAGV╚╬äš(w©┤)ā×(y©Łu)Ž╚╝ēŻ¼ĮŌøQ╣Ø(ji©”)³c╠ÄĄ─ø_═╗å¢Ņ}ĪŻąż├╚[7]ßśī”ČÓAGVø_═╗å¢Ņ}ęįĖ▀ā×(y©Łu)Ž╚╝ēā×(y©Łu)Ž╚═©▀^×ķįŁätŻ¼╠ß│÷ø_═╗┼ąō■(j©┤)ĘĮĘ©║═ų„▄ēĄ└ļpŽ“▓óąą▒▄┼÷▓▀┬įŻ¼═©▀^Ę┬šµ“×ūC║═īŹ¼F(xi©żn)įōĘĮĘ©ĪŻąż║ŻīÄĄ╚[8]čąÕ│å╬Ž“ę²ī¦(d©Żo)┬ĘĄ─AGVŽĄĮy(t©»ng)Ż¼Į©┴ó╗∙ė┌ėąŽ“łDĄ─AGVŽĄĮy(t©»ng)─Żą═Ż¼╗∙ė┌┤╦╠ß│÷┬ĘÅĮµi╦└Ą─ŲŲĮŌęÄ(gu©®)ätŻ¼═©▀^PIantSimuIationĘ┬šµ“×ūCŲõėąą¦ąįĪŻå╠ÄrĄ╚[9]čąÕ│į┌äėæB(t©żi)ūāäėŁh(hu©ón)Š│Ž┬Ż¼ßśī”AGV┼RĢrĖ─ūāąą▀M┬ĘŠĆĄ─ŪÕørŻ¼į┌Į╗▓µ╣Ø(ji©”)³cī”AGVĄ─ā×(y©Łu)Ž╚╝ē▀MąąäėæB(t©żi)š{(di©żo)š¹AGV═©▀^┬Ę┐┌Ēśą“Ż¼▓óęį┤╦Ė³ą┬AGV┬ĘŠĆŻ¼ęįĖ─▀MĢrķg┤░╦ŃĘ©▀MąąĘ┬šµīŹ“ׯ¼ūC├„ĘĮĘ©Ą─Š▀éõĖ³║├Ą─¶ö░¶ąį║═Ė▀ą¦┬╩ąįĪŻ
─┐Ū░Ą─蹊┐ČÓ×ķ┐╝æ]å╬┘Yį┤║═ļp┘Yį┤Ą─ģf(xi©”)═¼å¢Ņ}Ż¼į┌╚²┘Yį┤ģf(xi©”)═¼ū„śI(y©©)ĘĮ├µčąÕ│▌^╔┘Ż¼į┌ģf(xi©”)═¼čąÕ│ųą┐╝æ]░ß▀\▌d¾w┬Ę┐┌▒▄┼÷Ą─čąÕ│ę▓▌^╔┘ĪŻ▒Š╬─┐╝æ]é}Äņ┤µ╚ĪžøĄ─ČčČŌÖCĪó╣ż╬╗ķg░ß▀\╬’┴ŽĄ─AGV║═ŠĆ▀ģčbąČ╬’┴ŽĄ─ÖCąĄ╩ų╚²┘Yį┤Ą─ģf(xi©”)═¼ū„śI(y©©)ųąŻ¼═¼ĢrįO(sh©©)ėŗČÓAGVį┌Į╗▓µ┬Ę█╔Ą─┐╔═¼Ģr═©ąąĄ─▒▄┼÷ęÄ(gu©®)ätŻ¼ā×(y©Łu)╗»š¹éĆū„śI(y©©)▄ćķgĄ─╬’┴„ū„śI(y©©)ą¦┬╩ĪŻ
ßśī”ųŪ─▄╣żÅSųąČÓ░ß▀\▌d¾wĄ─ģf(xi©”)═¼ū„śI(y©©)å¢Ņ}Ż¼ęįé}Äņ┤µ╚ĪžøĄ─ČčČŌÖCĪó╣ż╬╗ķg░ß▀\╬’┴ŽĄ─AGV║═ŠĆ▀ģčbąČ╬’┴ŽĄ─ÖCąĄ╩ų×ķ蹊┐ī”Ž¾Ż¼čąŠ┐ČčČŌÖCŻ«AGVŻ«ŠĆ▀ģÖCąĄ
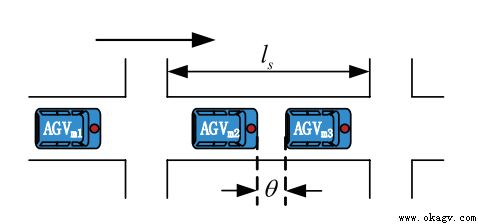
╩ų╚²éĆ┘Yį┤ģf(xi©”)═¼ł╠(zh©¬)ąą▀\▌ö╚╬äš(w©┤)Ą─═¼ĢrŻ¼┐╝æ]ČÓAGVį┌Į╗▓µ┬Ę┐┌Ą─▒▄┼÷å¢Ņ}Ż¼Į©┴óęįūŅ┤¾═Ļ╣żĢrķgūŅąĪ╗»Ą─öĄ(sh©┤)īW(xu©”)ęÄ(gu©®)äØ─Żą═Ż¼▓óĮ©┴ó│╔▒Šæ═┴P║»öĄ(sh©┤)ū„×ķ▌oų·ā×(y©Łu)╗»─Żą═ĪŻ▄ćķg╬’┴„ū„śI(y©©)┴„│╠╚ńłD1╦∙╩ŠŻ¼AGV n Ż¼į┌é}ÄņŪ░Ą─╬’┴ŽĮ╗Įė³cĄ╚┤²ČčČŌÖCīó╬’┴ŽÅ─┴ó¾wé}Äņ░ß▀\ĄĮAGV m ╔ŽŻ¼ė╔AGVĪŻ▀xō±ūŅā×(y©Łu)┬ĘÅĮŻ©╝t╔½┬ĘÅĮŻ®īó╬’┴Ž▀\▌ö?sh©┤)ĮąĶŪ¾╣ż╬╗┼įĄ─Į╗Įė³cŻ¼ė╔ÖCąĄ╩ų▀MąąąČ▌dĪŻ
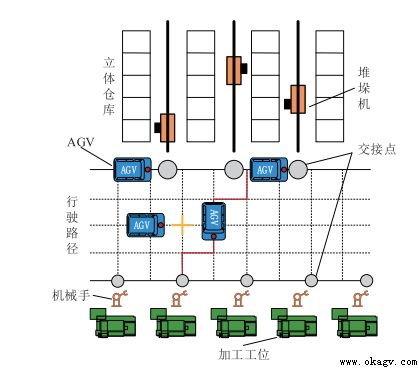
łD1 ▄ćķgČÓ░ß▀\▌d¾wģf(xi©”)ū„┴„│╠łD
Ė∙ō■(j©┤)ųŪ─▄▄ćķgĄ─īŹļHŪķørŻ¼×ķ┴╦▒Ńė┌─Żą═Ū¾ĮŌĘų╬÷ęį╝░┐╝æ]AGVĮ╗▓µ┬Ę┐┌Ą─┼÷ū▓Ūķą╬Ż¼ī”å¢Ņ}▀Mąą║Ž└ĒĄ─╝┘įO(sh©©)┼c║å╗»Ż║
1Ż®AGVį┌┐š▌d║═žō▌dĄ─ŪķørŽ┬Š∙×ķä“╦┘ąą±éŻ╗
2Ż®▓╗┐╝æ]AGV╝ė╦┘║═£p╦┘▀^│╠Ż╗
3Ż®░ß▀\▌d¾w▄ćør┴╝║├ŪęŠ∙ėąŅ~Č©╚▌┴┐Ż╗
4Ż®AGVĄ─╚╬äš(w©┤)ł╠(zh©¬)ąą▀^│╠×ķ▀B└m(x©┤)Ą─Ż¼▓╗┤µį┌ųąöÓĄ─ŪķørŻ╗
5Ż®AGV┐╔═¼ĢrĮė╩▄ČÓéĆ╚╬äš(w©┤)Ż¼ę└┤╬ł╠(zh©¬)ąąŻ╗
6Ż®┐╝æ]AGVį┌┬Ę┐┌Ą─┼÷ū▓║═Č┬╚¹ŪķørŻ╗
7Ż®ČčČŌÖC║═ÖCąĄ╩ųĄ─▓┘ū„Ģrķg║═čbąČĒśą“×ķ╝║ų¬Ż╗
8Ż®Ė„░ß▀\▌d¾wķgŽÓ╗ź¬Ü┴óŻ¼▓╗┤µį┌╝s╩°Ūķą╬Ż╗
9Ż®ąĪ▄ćį┌╚▌┴┐│õūŃĄ─ŪķørŽ┬Ż¼┐╔░ß▀\ČÓéĆ╬’┴Ž╗“╣ż╝■Ż╗
10Ż®═¼ŅÉą═░ß▀\▌d¾wĄ─╣żū„─▄┴”ųĖś╦ŽÓ═¼ĪŻ
HŻ║▒Ē╩Š┬ĘÅĮ╣Ø(ji©”)³cĄ─╝»║ŽŻ¼h=1Ż¼2Ż¼ĪżĪżĪżŻ¼H;IŻ║▒Ē╩Š╚╬äš(w©┤)Ą─║Ž╝»Ż¼i=1Ż¼2Ż¼ĪżĪżĪżŻ¼LŻ║▒Ē╩ŠČčČŌÖCĄ─╝»║ŽŻ¼i=1Ż¼2Ż¼ĪżĪżĪżŻ¼LŻ╗MŻ║▒Ē╩ŠAGVĄ─╝»║ŽŻ¼m=1Ż¼2Ż¼•••,M;NŻ║▒Ē╩ŠÖCąĄ╩ųĄ─╝»║ŽŻ¼n=1Ż¼2Ż¼ĪżĪżĪżŻ¼N;SŻ║▒Ē╩Š┬ĘÅĮĄ─╝»║ŽŻ«s=1Ż¼2Ż¼ĪżĪżĪżŻ¼S:KŻ║▒Ē╩Š┬Ę┐┌Ą─║Ž╝»Ż¼k=1Ż¼2Ż¼ĪżĪżĪżŻ¼K:TiŻ║▒Ē╩Š╚╬äš(w©┤)iĄ─═Ļ╣żĢrķgŻ╗T1Ż║▒Ē╩ŠČčČŌÖCł╠(zh©¬)ąą═Ļå╬éĆ╚╬äš(w©┤)╦∙ąĶĄ─ŲĮŠ∙ĢrķgŻ╗TnŻ║▒Ē╩ŠÖCąĄ╩ųł╠(zh©¬)ąą═Ļå╬éĆ╚╬äš(w©┤)╦∙ąĶĄ─ŲĮŠ∙ĢrķgŻ╗TLiŻ║▒Ē╩ŠČčČŌÖCIķ_╩╝ł╠(zh©¬)ąą╚╬äš(w©┤)iĄ─Ģr┐╠Ż╗EniŻ║▒Ē╩ŠÖCąĄ╩ųnł╠(zh©¬)ąą═Ļ╚╬äš(w©┤)iĄ─Ģr┐╠Ż╗TiŻ║▒Ē╩ŠÖCąĄ╩ųnķ_╩╝ł╠(zh©¬)ąą╚╬äš(w©┤)iĄ─Ģr┐╠Ż║TilmŻ║▒Ē╩ŠAGVmķ_╩╝ł╠(zh©¬)ąąČčČŌÖC1ł╠(zh©¬)ąą═ĻĄ─╚╬äš(w©┤)iĄ─Ģr┐╠Ż╗qmsŻ║▒Ē╩ŠAGVĪŻąą±éĄ─ŠÓļxŻ╗VmŻ║▒Ē╩ŠAGVĪŻĄ─ąą±é╦┘Č╚Ż╗t1mnŻ║▒Ē╩ŠAGVmÅ─ČčČŌÖCąą±éų┴ÖCąĄ╩ųn╦∙ąĶĄ─ĢrķgŻ╗qms▒Ē╩ŠAGVmį┌Į╗▓µ┬Ę┐┌╦∙╠ÄĄ─ŽÓ╬╗Ż╗QqmsŻ║▒Ē╩ŠAGmį┌Į╗▓µ┬Ę┐┌╦∙╠ÄŽÓ╬╗Ą─╝»║ŽĪŻ
timŻ║AGVmł╠(zh©¬)ąą═Ļ╚╬äš(w©┤)iĢr┐╠Ż╗
×ķīŹ¼F(xi©żn)▄ćķg╣żū„ą¦┬╩ūŅ┤¾╗»║═╬’┴Ž╦═▀_Ģrķgš`▓ŅūŅąĪŻ¼▒Š╬─╠ß│÷ųŪ─▄▄ćķgČÓ░ß▀\▌d¾wģf(xi©”)═¼ū„śI(y©©)Ą─ā╔éĆā×(y©Łu)╗»─┐ś╦Ż¼śŗ(g©░u)Į©═Ļ╣żĢrķg║═æ═┴P│╔▒ŠŠ∙ūŅĄ═Ą─ČÓ─┐ś╦ā×(y©Łu)╗»║»öĄ(sh©┤)ĪŻ
minZ=max{Ti} (1)
Ųõųą
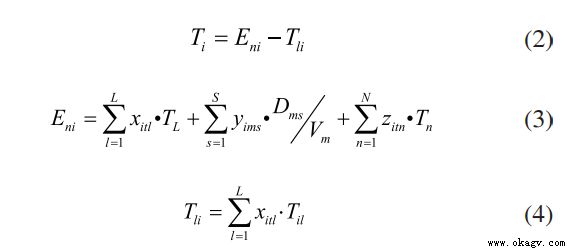
╩ĮųąŻ¼Ti▒Ē╩Š╚╬äš(w©┤)iĄ─═Ļ╣żĢrķgŻ¼T1i▒Ē╩ŠČčČŌÖC1ķ_╩╝ł╠(zh©¬)ąą╚╬äš(w©┤)iĄ─Ģr┐╠Ż¼Eni▒Ē╩ŠÖCąĄ╩ųnł╠(zh©¬)ąą═Ļ╚╬äš(w©┤)iĄ─Ģr┐╠Ż¼š¹¾wā×(y©Łu)╗»─┐ś╦×ķūŅ┤¾═Ļ╣żĢrķgūŅąĪ╗»ĪŻ
ßśī”╬’┴Ž╦═▀_▀^│╠┐╔─▄│÷¼F(xi©żn)Ą─╠ßŪ░╦═▀_Īó£╩Ģr╦═▀_║═čė▀t╦═▀_╚²ĘNŪķørŻ¼▒Š╬─ī”╚²ĘN╦═▀_ŪķørĮ©┴óŽÓæ¬(y©®ng)Ą─│╔▒Šæ═┴P║»öĄ(sh©┤)Ż¼▓óū„×ķĄ┌Č■éĆā×(y©Łu)╗»─┐ś╦Ż¼╚ń╩Į(5)╦∙╩ŠĪŻ
minC=min{f(tim)} (5)
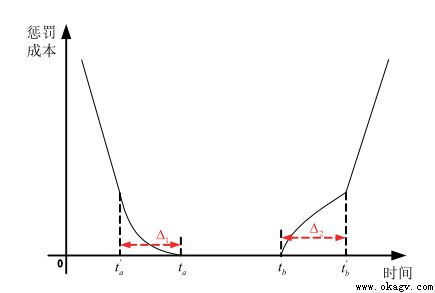
ŲõųąŻ¼┐╝æ]ĄĮ╬’┴Ž▀\▌öčė▀t╦═▀_ī”ĒŚ─┐▀MČ╚Ą─ė░Ēæōp╩¦▒╚╬’┴Ž▀\▌ö╠ßŪ░╦═▀_ī”ĒŚ─┐▀MČ╚Ą─ė░Ēæōp╩¦Ė³×ķć└ųžŻ¼═¼Ģr×ķį÷ÅŖ┘Yį┤┼õų├▀^│╠ųąĄ─╚ßąį[10,11]Ż¼Į©┴ó╚ńłD2╦∙╩ŠĄ─Ū·ŠĆą═▄øĢrķg┤░│╔▒Šæ═┴P║»öĄ(sh©┤)ĪŻ
╝┘įO(sh©©)ūŅ╝čĄĮ▀_Ą─Ģrķg┤░×ķ[ta,tb]Ż¼į┌┤╦╗∙ĄA(ch©│)╔ŽŻ¼┐╔Ų½ļxĄ├ĄĮ┐╔Įė╩▄Ę■äš(w©┤)Ģrķg┤░[t'a,t'b]Ż¼ŲõųąŻ¼t'a=ta-”ż1Ż¼t'b=tb+”ż2ĪŻ╚¶AGVmį┌[ta,tb]ā╚(n©©i)īó╬’┴Ž╦═▀_ųĖČ©╣ż╬╗Ż¼æ═┴P│╔▒Š×ķ0Ż╗╚¶AGVmį┌[t'a,t'b]╗“[tb,t'b]ā╚(n©©i)īó╬’┴Ž╦═▀_ųĖČ©╣ż╬╗Ż¼ų╗ąĶ│ąō·(d©Īn)▌^╔┘Ą─æ═┴P│╔▒ŠŻ╗╚¶AGVmį┌Ż©0Ż¼t'a)╗“Ż©t'bŻ¼Ī▐ )ā╚(n©©i)īó╬’┴Ž╦═▀_ųĖČ©╣ż╬╗Ż¼ätąĶę¬│ąō·(d©Īn)▌^ČÓĄ─æ═┴P│╔▒ŠĪŻ╗∙ė┌Ū·ŠĆą═▄øĢrķg┤░Ą─│╔▒Šæ═┴P║»öĄ(sh©┤)╚ń╩ĮŻ©6Ż®╦∙╩ŠĪŻ
łD2 ╗∙ė┌Ū·ŠĆą═▄øĢrķg┤░Ą─æ═┴P│╔▒Š║»öĄ(sh©┤)
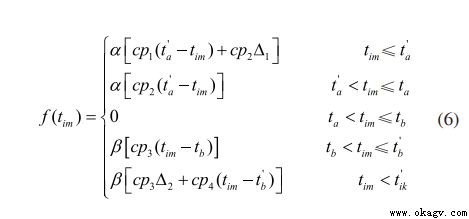
╩ĮŻ©6Ż®▒Ē╩Šį┌Ū·ŠĆą═▄øĢrķg┤░Ą─╝s╩°Ž┬Ż¼AGVmł╠(zh©¬)ąą═Ļ╚╬äš(w©┤)iĄ─Ģr┐╠tim╦∙ī”æ¬(y©®ng)Ą─æ═┴P│╔▒ŠĪŻ╚ńłD2╦∙╩ŠŻ¼╚¶AGVmį┌t'aĢr┐╠ų«Ū░╦═▀_Ż¼å╬╬╗Ģrķg╦∙ąĶ│ąō·(d©Īn)Ą─æ═┴P│╔▒Š×ķcp1Ż¼═¼Ģr▀ĆąĶę¬│ąō·(d©Īn)[t'a,ta]ĢrķgČ╬╦∙«a(ch©Żn)╔·Ą─æ═┴P│╔▒ŠŻ╗╚¶AGVmį┌[t'a,ta]ĢrķgČ╬ā╚(n©©i)╦═▀_Ż¼å╬╬╗Ģrķg╦∙ąĶ│ąō·(d©Īn)Ą─æ═┴P│╔▒Š×ķcp2Ż╗╚¶AGVmį┌[ta,tb]ĢrķgČ╬ā╚(n©©i)╦═▀_Ż¼æ═┴P│╔▒Š×ķ0Ż╗╚¶AGVmį┌[tb,t'b]ĢrķgČ╬ā╚(n©©i)╦═▀_Ż¼å╬╬╗Ģrķg╦∙ąĶ│ąō·(d©Īn)Ą─æ═┴P│╔▒Š×ķcp3Ż╗╚¶AGVmį┌t'bĢr┐╠ęį║¾╦═▀_Ż¼ī”æ¬(y©®ng)Ą─å╬╬╗Ģrķg╦∙ąĶ│ąō·(d©Īn)Ą─æ═┴P│╔▒Š×ķcp4Ż¼═¼Ģr▀ĆąĶ│ąō·(d©Īn)[tb,t'b]ĢrķgČ╬╦∙«a(ch©Żn)╔·Ą─æ═┴P│╔▒ŠĪŻ
╩ĮųąŻ¼”┴║═”┬×ķ╠ßŪ░╦═▀_║═čė▀t╦═▀_Ą─│╔▒Šæ═┴PÖÓ(qu©ón)ųžŻ¼Ęųäe╚ĪųĄ×ķ0.1║═0.8[12]ĪŻ
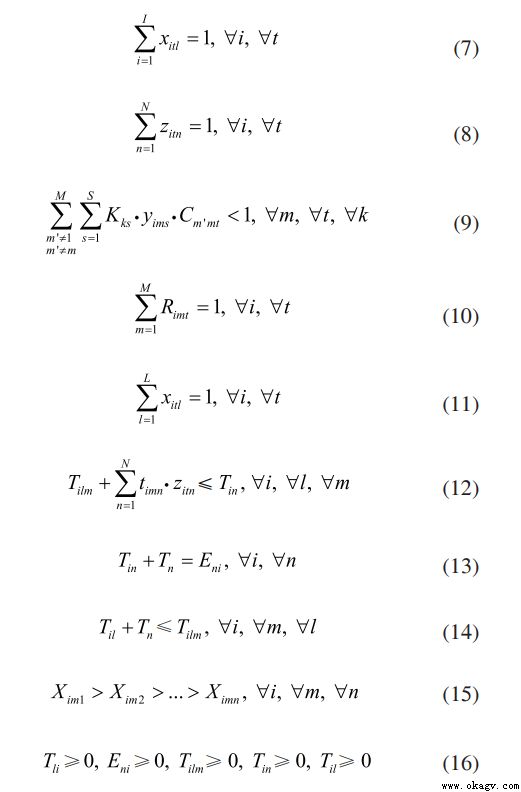
ŲõųąŻ¼╩ĮŻ©7Ż®▒Ē╩Š╚╬║╬Ģr┐╠ę╗┼_ČčČŌÖCų╗─▄▒╗Ęų┼õę╗éĆ╚╬äš(w©┤)Ż╗╩ĮŻ©8Ż®▒Ē╩Š╚╬ęŌĢr┐╠═¼ę╗╚╬äš(w©┤)ų╗─▄▒╗Ęų┼õĮoę╗éĆ╝ė╣ż╣ż╬╗Ż╗╩ĮŻ©9Ż®▒Ē╩Šā╔┼_ŽÓ╬╗ŽÓø_═╗Ą─AGV▓╗─▄═¼Ģr═©▀^┬Ę┐┌Ż╗╩ĮŻ©10Ż®▒Ē╩Š├┐éĆ╚╬äš(w©┤)į┌═¼ę╗Ģr┐╠ų╗─▄ė╔ę╗┼_AGVł╠(zh©¬)ąąŻ╗╩ĮŻ©(1)▒Ē╩Š├┐éĆ╚╬äš(w©┤)į┌╚╬ęŌĢr┐╠ų╗─▄Ęų┼õĮoę╗éĆČčČŌÖCŻ╗╩ĮŻ©12Ż®▒Ē╩ŠÖCąĄ╩ųķ_╩╝╠Ä└ĒĄ─Ģr┐╠▓╗Ą├įńė┌AGVīó╬’┴Ž╦═▀_ÖCąĄ╩ų╦∙į┌Į╗Įė³cĄ─Ģr┐╠Ż║╩ĮŻ©13Ż®▒Ē╩Š╚╬äš(w©┤)▒╗═Ļ│╔Ą─Ģr┐╠Ż╗╩ĮŻ©14Ż®▒Ē╩Šų╗ėąį┌ČčČŌÖCīó╬’┴ŽąČ▌dį┌Į╗Įė³c║¾Ż¼AGV▓┼─▄ķ_╩╝ł╠(zh©¬)ąą╚╬äš(w©┤)Ż╗╩ĮŻ©Ū╔Ż®▒Ē╩Š├┐┼_AGV┤²ł╠(zh©¬)ąąĄ─╚╬äš(w©┤)ąĶę└┤╬┼┼ą“ł╠(zh©¬)ąąŻ║╩ĮŻ©16Ż®▒Ē╩ŠģóöĄ(sh©┤)Ą─ĘŪžōŽ▐ųŲĪŻ
┬Ę┐┌┼÷ū▓┐╔Ęų×ķŽÓŽ“ø_═╗Īó┬Ę┐┌ø_═╗║═╣Ø(ji©”)³cš╝ė├ø_═╗╚²ĘN[13]ĪŻé„Įy(t©»ng)┬Ę┐┌▒▄┼÷×ķŅ}┤¾ČÓ┘xėĶAGV▓╗═¼╝ēäeĄ─ā×(y©Łu)Ž╚╝ēŻ¼░┤ā×(y©Łu)Ž╚╝ēĖ▀Ą═ę└┤╬═©▀^Ż¼å╬┤╬ų╗─▄═©▀^ę╗▌vAGV[13]ĪŻ▒Š╬─čąÕ│ųąŻ¼×ķ╩╣AGV▒▄┼÷Łh(hu©ón)╣Ø(ji©”)Ė³┘NĮ³īŹļHŻ¼AGVį┌ąą±é▀^│╠ųąĮø(j©®ng)▀^─│Į╗▓µ┬Ę┐┌ĢrŻ¼Ė∙ō■(j©┤)é„ĖąŲ„║═RFID▓╔╝»Ą─öĄ(sh©┤)ō■(j©┤)Ż¼Ęų╬÷«ö(d©Īng)Ū░┬Ę┐┌Ą─═©ąąŪķør║═┬Ę┐┌AGVąą±éą┼ŽóŻ¼═©▀^Öz£y├┐▌vAGVĄ─ąą±éĘĮŽ“Ż¼┼ąöÓČÓ▌vAGVĄ─╩Ūʱ┐╔═¼Ģr═©ąąŻ¼▓óī”ŽÓø_═╗Ą─AGV▀Mąąā×(y©Łu)Ž╚╝ēš{(di©żo)š¹Ż¼╩╣┬Ę┐┌┐╔═¼Ģr═©ąąČÓ▌vAGVŻ¼ėąą¦£p╔┘Ą╚┤²Ģrķg║═┼÷ū▓ŪķørĄ─«a(ch©Żn)╔·ĪŻ
AGVąą±é┼RĮ³Į╗▓µ┬Ę┐┌ĢrŻ¼Ė∙ō■(j©┤)é„ĖąŲ„║═RFID▓╔╝»Ą─öĄ(sh©┤)ō■(j©┤)Ż¼┐žųŲŽĄĮy(t©»ng)ī”AGV╬╗ų├║═ĢrķgĀŅæB(t©żi)▀MąąĖ³ą┬Ż¼Öz£y▓óĘų╬÷į┌╝┤īó±é?c©©)ļĄ─┬Ę┐┌╩ŪʱĢ■░l(f©Ī)╔·ø_═╗╝░Ųõø_═╗ŅÉą═ĪŻ
Öz£yųąģóöĄ(sh©┤)Č©┴x╚ńŽ┬Ż║
1)”╦bm×ķ▒Ē╩ŠAGVmĄĮ▀_╣Ø(ji©”)³chĄ─ĢrķgŻ╗
2Ż®”┼hm×ķ▒Ē╩ŠAGVmį┌╣Ø(ji©”)³chĄ─═Ż┴¶ĢrķgŻ╗
3Ż®”╚×ķ▒Ē╩Šø_═╗Öz£yĢrĄ─░▓╚½ĢrķgķgĖ¶ķōųĄŻ╗
4Ż®Kmh×ķ╣Ø(ji©”)³chĄ─ūRäe┤aŻ¼Ūęįō╣Ø(ji©”)³cį┌AGVmĄ─ęÄ(gu©®)äØąą±é┬ĘÅĮųąŻ╗
5Ż®Kmh-1<Kmh<Kmh+1×ķAGVm═©▀^Ą─╣Ø(ji©”)³cĒśą“ĪŻ
ø_═╗Öz£y─Żą═╚ńŽ┬Ż║
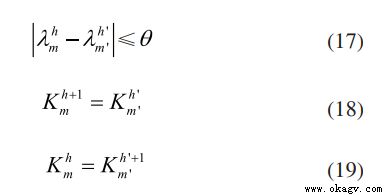
1Ż®ŽÓŽ“ø_═╗
╚¶Öz£y▀^│╠ųąØMūŃęįŽ┬ĻP(gu©Īn)ŽĄ╩Į(17)Īó╩Į(18)Īó╩Į(19)Ż¼ätAGVį┌┬Ę┐┌īó░l(f©Ī)╔·ŽÓŽ“ø_═╗ĪŻ
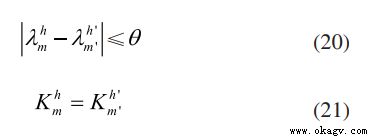
2Ż®┬Ę┐┌ø_═╗
╚¶Öz£y▀^│╠ųąØMūŃęįŽ┬ĻP(gu©Īn)ŽĄ╩ĮŻ©20Ż®║═╩ĮŻ©21Ż®Ż¼ätAGVį┌Ž┬ę╗┬Ę█╔īó░l(f©Ī)╔·┬Ę┐┌ø_═╗ĪŻ
3Ż®╣Ø(ji©”)³cš╝ė├
╚¶Öz£y▀^│╠ųąØMūŃęįŽ┬ĻP(gu©Īn)ŽĄ╩ĮŻ©22Ż®║═╩ĮŻ©23Ż®Ż¼ätAGVį┌Ž┬ę╗┬Ę┐┌īó░l(f©Ī)╔·╣Ø(ji©”)³cø_═╗ĪŻ
╚ńłD3╦∙╩ŠŻ¼AGVmąą±éų┴Į╗▓µ┬Ę┐┌ĢrŻ¼├┐▌vAGVmŠ∙ėąg(sh©┤)sĪótlĪótr╚²ĘNąą±éĘĮŽ“Ą─┐╔─▄ąįŻ¼Ęųäe┤·▒Ēų▒ąąĪóū¾▐D(zhu©Żn)Īóų▒ąąŻ¼į┌┬Ę┐┌įO(sh©©)ų├╗ź╚▌║═▓╗╚▌ā╔ĘN═©ąąŽÓ╬╗Ż¼╠Äė┌╗ź╚▌ŽÓ╬╗Ą─ČÓ▌vAGV┐╔į┌▓╗┼÷ū▓Ą─ŪķørŽ┬═¼Ģr═©▀^Ż¼╠Äė┌▓╗╚▌ŽÓ╬╗Ą─ČÓ▌vAGV▓╗─▄═¼Ģr═©▀^┬Ę┐┌Ż¼Ż©╝┘įO(sh©©)┬Ę┐┌Ą─▐D(zhu©Żn)ÅØ░ļÅĮ┐╔═¼Ģr╚▌╝{ā╔▌v╗ź╚▌ŽÓ╬╗Ą─AGV═¼Ģr═©▀^Ż®ĪŻ▒╚╚ńAGVtrm1ät▒Ē╩ŠAGVm1į┌┬Ę┐┌ėę▐D(zhu©Żn)Ż¼ät┼cAGVtlm2ĪóAGVtrm2ĪóAGVtrm3ĪóAGVgsm2ĪóAGVtrm4ĪóAGVgsm4╩Ū╗ź╚▌ŽÓ╬╗Ż¼┐╔═¼Ģr═©▀^┬Ę┐┌Ż¼┼cAGVgsm2ĪóAGVtlm3ĪóAGVtlm4╩Ū▓╗╚▌ŽÓ╬╗Ż¼▓╗┐╔═¼Ģr═©▀^┬Ę┐┌Ż¼Ųõ═©▀^┬Ę┐┌Ēśą“ąĶĖ∙ō■(j©┤)ā×(y©Łu)Ž╚╝ēš{(di©żo)š¹┤_Č©ĪŻ
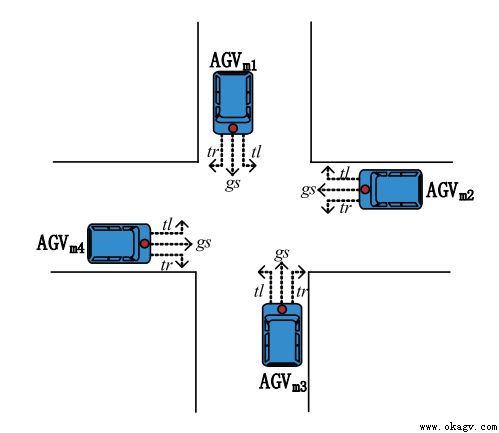
łD3 AGVį┌┬Ę┐┌Ą─ø_═╗ŽÓ╬╗łD
į┌Į╗▓µ┬Ę┐┌╠Äė┌▓╗╚▌ŽÓ╬╗Ą─AGVŻ¼×ķ▒ŻūCĖ„AGVų«ķgėą├„┤_Ą─ā×(y©Łu)Ž╚ĻP(gu©Īn)ŽĄŻ¼═©▀^┘xėĶAGVā×(y©Łu)Ž╚╝ēüĒ┤_Č©═©┬Ę┐┌Ą─Ž╚║¾Ēśą“Ż¼Ųõę└ō■(j©┤)╩ŪĖ∙ō■(j©┤)└Ēšō╔ŽAGV═Ļ│╔š²į┌ł╠(zh©¬)ąą╚╬äš(w©┤)Ą─╩ŻėÓĢrķgŻ¼ųĄįĮąĪŻ¼ätAGVā×(y©Łu)Ž╚╝ēįĮ┤¾Ż¼▓╗═¼Ą─ā×(y©Łu)Ž╚╝ēęįį÷Ę∙AüĒ┤_Č©Ż¼╚¶╩Ū┐š▌d▄ć▌vŻ¼ā×(y©Łu)Ž╚╝ēätįO(sh©©)×ķūŅĄ═ĪŻ
ŲõųąŻ║
╩ĮųąŻ¼restŻ©Ti)▒Ē╩Š╚╬äš(w©┤)iĄ─╩ŻėÓ═Ļ╣żĢrķgŻ╗Number(k)▒Ē╩Š«ö(d©Īng)Ū░┬Ę┐┌┼┼ĻĀ▓╗╚▌ŽÓ╬╗┼┼ĻĀ═©ąąĄ─▄ć▌vöĄ(sh©┤)ĪŻ
×ķ£p╔┘ļp┬Ę┐┌ų«ķg┬ĘÅĮĄ─Č┬╚¹¼F(xi©żn)Ž¾Ż¼«ö(d©Īng)AGV╝┤īóĄų▀_ļp┬Ę┐┌┬ĘÅĮĢrŻ¼į┌Öz£yĮ╗▓µ┬Ę┐┌ø_═╗ŪķørĄ─═¼ĢrŻ¼Öz£yļp┬Ę┐┌ų«ķg┬ĘÅĮČ┬╚¹ŪķørŻ¼įu╣└«ö(d©Īng)Ū░╩Ūʱ┐╔ęį▀M╚ļįō┬ĘÅĮČ°▓╗įņ│╔Č┬╚¹Ż¼╚ńłD4╦∙╩ŠŻ¼įu╣└ś╦£╩×ķ┬ĘÅĮ╩ŻėÓ┐╔╚▌╝{Ą─▄ć▌vöĄ(sh©┤)Ż║
N(s)=F[ s ]-Y(s) (25)
łD4 ļp┬Ę┐┌┬ĘÅĮ╚▌┴┐Öz£y╩ŠęŌłD
╩ĮųąŻ¼NŻ©sŻ®×ķ┬ĘÅĮsĄ─╩ŻėÓ┐╔╚▌╝{Ą─▄ć▌vöĄ(sh©┤)Ż╗FŻ©sŻ®×ķ┬ĘÅĮ┐╔╚▌╝{▄ć▌vĄ─Ņ~Č©╚▌┴┐Ż¼╚ĪųĄŽ“Ž┬╚Īš¹Ż╗Y(s)×ķ┬ĘÅĮsųą╝║▀M╚ļĄ─▄ć▌vöĄ(sh©┤)Ż╗ls×ķ┬ĘÅĮsĄ─ķLČ╚Ż╗
lAGVm×ķAGVmĄ─ķLČ╚Ż¼”╚×ķąą▄ć▀^│╠ųąĄ─ūŅąĪ░▓╚½ŠÓļxĪŻ
«ö(d©Īng)NŻ©sŻ®Ż╝1ĢrŻ¼īóĮ¹ų╣AGV═©▀^Į╗▓µ┬Ę┐┌Ż¼Ą╚┤²ų▒ų┴ėąAGVÅ─┬ĘÅĮ±é│÷ĪŻ
PSO╩ŪKennedy║═Eberhart╩▄°B╚║╚║¾w▀\äėĄ─åó░l(f©Ī)ė┌1995─Ļ╠ß│÷Ą─ę╗ĘNą┬Ą─╚║ųŪ─▄ā×(y©Łu)╗»╦ŃĘ©[14]Ż¼═©▀^┴ŻūėķgĄ─ą┼Žó╣▓ŽĒŻ¼ģf(xi©”)ū„═Ļ│╔īżā×(y©Łu)╚╬äš(w©┤)Ż¼Š▀ėąėøæøąįÅŖĪóą¦┬╩
Ė▀║═╦č╦„╦┘Č╚┐ņĄ╚╠ž³cŻ¼Ą½ęūŽ▌╚ļŠų▓┐ūŅā×(y©Łu)Ż¼╝┤Šų▓┐īżā×(y©Łu)─▄┴”ÅŖŻ¼╚½Šųīżā×(y©Łu)─▄┴”╚§[15]ĪŻ▒Š╬─ī”┴Żūė╚║╦ŃĘ©▀Mąąā×(y©Łu)╗»Ż¼▓╔ė├äėæB(t©żi)æTąįÖÓ(qu©ón)ųž║═ę²╚ļ▀zé„╦ŃĘ©ųąĄ─ūį▀mæ¬(y©®ng)ūā«ÉĖ┼┬╩Ż¼▒▄├Ō╦ŃĘ©║¾Ų┌Ž▌╚ļŠų▓┐ūŅā×(y©Łu)Ż¼╠ß╔²╦ŃĘ©Ą─╩šö┐─▄┴”║═╩šö┐Š½Č╚Ż¼╦ŃĘ©┴„│╠╚ńłD5╦∙╩ŠĪŻ
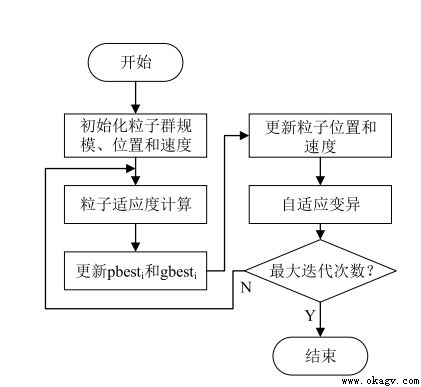
łD5ā×(y©Łu)╗»ūį▀mæ¬(y©®ng)┴Żūė╚║╦ŃĘ©┴„│╠łD
įO(sh©©)Ū¾ĮŌ─Żą═Ą─ŠSČ╚×ķDŠSŻ¼ėą1éĆ┴ŻūėŻ¼┴Żūė╚║×ķL={p1,p2,ĪŁ,pi,ĪŁ,pl}╦┘Č╚▒Ē╩Š×ķV={v1,v2,ĪŁ,vi,ĪŁ,vD}Ż¼╬╗ų├▒Ē╩Š×ķX={x1,x2,ĪŁ,xi,ĪŁ,xD}Ż¼pbesti▒Ē╩Š┴ŻūėiĮø(j©®ng)▀^Ą─ūŅ╝č╬╗ų├Ż¼gbesti▒Ē╩Š╦∙ėą┴ŻūėĮø(j©®ng)Üv▀^Ą─ūŅ╝č╬╗ų├ĪŻPSO╦ŃĘ©Ą─┴ŻūėiĄ─Ą┌DŠS╦┘Č╚Ė³ą┬╣½╩Į×ķ╩Į(27)Ż¼┴ŻūėiĄ─Ą┌DŠS╬╗ų├╣½╩Į×ķ╩Į(28)Ż║
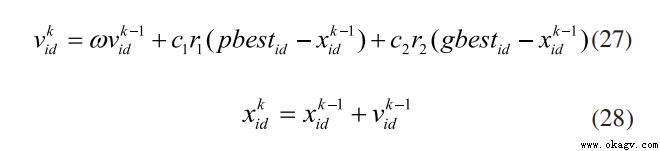
╩ĮųąŻ¼vkid▒Ē╩Š┴Żūėi▀MąąĄ┌k┤╬Ą³┤·Ģr╦┘Č╚╩Ė┴┐Ą─Ą┌DŠSĘų┴┐Ż╗vkid▒Ē╩Š┴Żūėi▀MąąĄ┌k┤╬Ą³┤·Ģr╬╗ų├╩Ė┴┐Ą─Ą┌DŠSĘų┴┐Ż╗c1Ż¼c2▒Ē╩ŠīW(xu©”)┴Ģ(x©¬)ę“ūė╝ė╦┘Č╚Ż¼ŲõųĄ×ķ│ŻöĄ(sh©┤)Ż╗r1Ż¼r2×ķ╚ĪųĄĘČć·×ķ[0,1]Ą─ā╔éĆļSÖCģóöĄ(sh©┤)Ż╗w▒Ē╩ŠæTąįÖÓ(qu©ón)ųžŻ¼╚ĪųĄĘŪžōŻ¼ė├üĒš{(di©żo)╣Ø(ji©”)ī”ĮŌ┐šķgĄ─╦č╦žĘČć·ĪŻ
æTąįÖÓ(qu©ón)ųž▒Ē╩Š┴ŻūėiĄ─Ž╚Ū░╦┘Č╚ī”«ö(d©Īng)Ū░╦┘Č╚Ą─ė░ĒæĪŻ╚½Šųīżā×(y©Łu)─▄┴”┼cŲõųĄ│╔š²▒╚Ż¼Šų▓┐īżā×(y©Łu)─▄┴”┼cŲõųĄ│╔Ę┤▒╚Ż╗Ę┤ų«Ż¼┴ŻūėŠų▓┐īżā×(y©Łu)─▄┴”ÅŖŻ¼╚½Šųīżā×(y©Łu)─▄┴”╚§ĪŻ╝┤Ż¼ųĄ▀^┤¾Ż¼ät╚▌ęūÕe▀^ūŅā×(y©Łu)ĮŌŻ╗ųĄ▀^ąĪŻ¼ät╦ŃĘ©╩šö┐╦┘Č╚┬²╗“╩Ū╚▌ęūŽ▌╚ļŠų▓┐ūŅā×(y©Łu)ĮŌĪŻ«ö(d©Īng)å¢Ņ}┐šķg▌^┤¾ĢrŻ¼×ķ┴╦į┌╦č╦ž╦┘Č╚║═╦č╦„Š½Č╚ų«ķg▀_ĄĮŲĮ║ŌŻ¼╣╩▒Š╬─▓╔ė├äėæB(t©żi)æTąįÖÓ(qu©ón)ųž╩Į(29)Ż¼╩╣╦ŃĘ©į┌Ą³┤·│§Ų┌ėą▌^Ė▀Ą─╚½Šų╦č╦„─▄┴”ęįĄ├ĄĮ║Ž▀mĄ─ĘNūėŻ¼Č°į┌║¾Ų┌ėą▌^Ė▀Ą─Šų▓┐╦č╦„─▄┴”ęį╠ßĖ▀╩šö┐Š½Č╚Ż¼ļSų°Ą³┤·┤╬öĄ(sh©┤)Ąžį÷╝ėŻ¼w▓╗öÓ£pąĪŻ¼▀MČ°╩╣╦ŃĘ©į┌│§Ų┌ėą▌^ÅŖĄ─╚½Šų╩šö┐─▄┴”Ż¼Č°║¾Ų┌ėą▌^ÅŖĄ─Šų▓┐╩šö┐─▄┴”ĪŻ
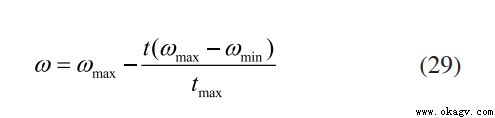
╩ĮųąŻ¼wmax▒Ē╩ŠūŅ┤¾æTąįÖÓ(qu©ón)ųžŻ╗wmin▒Ē╩ŠūŅąĪæTąįÖÓ(qu©ón)ųžŻ╗t▒Ē╩Š«ö(d©Īng)Ū░Ą³┤·┤╬öĄ(sh©┤)Ż╗tmax▒Ē╩Š╦ŃĘ©ūŅ┤¾Ą³┤·┤╬öĄ(sh©┤)ĪŻ
į┌╦ŃĘ©Ą³┤·│§Ų┌Ż¼ĘN╚║éĆ¾wĄ─▓Ņ«Éąį▌^┤¾Ż¼×ķ▒▄├Ō«a(ch©Żn)╔·▓╗┴╝ĮŌŻ¼═¼Ģr×ķ╩╣╦ŃĘ©┐ņ╦┘╩šö┐Ż¼æ¬(y©®ng)ęį▌^ąĪĄ─Ė┼┬╩▀Mąąūā«ÉĪŻį┌Ą³┤·║¾Ų┌Ż¼ĘN╚║éĆ¾wČÓśėąįųØuĮĄĄ═Ż¼×ķ▒▄├Ō╦ŃĘ©Ž▌╚ļŠų▓┐ūŅā×(y©Łu)[14]Ż¼æ¬(y©®ng)ęįį÷┤¾éĆ¾wĄ─ūā«É┬╩ĪŻ
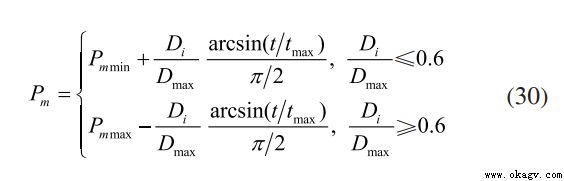
╩ĮųąŻ¼Pmmin▒Ē╩ŠūŅąĪĄ─ūā«ÉĖ┼┬╩Ż¼╚ĪųĄ×ķ0.01Ż╗Pmmax▒Ē╩ŠūŅ┤¾Ą─ūā«ÉĖ┼┬╩Ż¼╚ĪųĄ×ķ0.1ĪŻt▒Ē╩Š«ö(d©Īng)Ū░Ą─Ą³┤·┤╬öĄ(sh©┤)Ż╗tmax▒Ē╩ŠūŅ┤¾Ą─Ą³┤·┤╬öĄ(sh©┤)Ż╗Di▒Ē╩Š┴ŻūėiĄĮ«ö(d©Īng)Ū░ūŅā×(y©Łu)ĮŌĄ─ÜW╩ŽŠÓļxŻ╗Dmax▒Ē╩ŠĘN╚║ųąļx«ö(d©Īng)Ū░ūŅā×(y©Łu)ĮŌūŅ▀hĄ─┴ŻūėiĄ─ūŅ┤¾ÜW╩ŽŠÓļxĪŻ
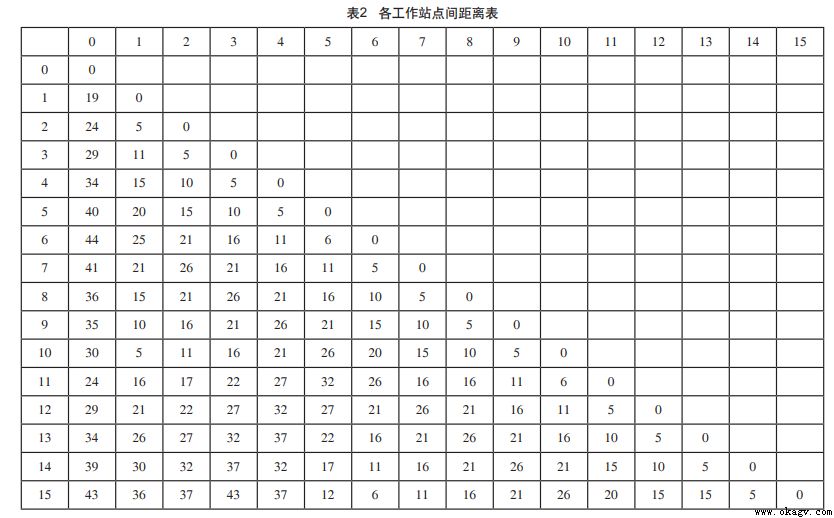
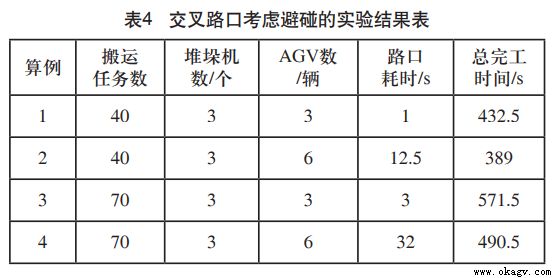
ęįļŖÜŌ┼õ╝■ųŲįņ▄ćķg×ķ└²▀Mąą▒Š╬─Ą─īŹ└²“×ūCĪŻįō▄ćķgĄ─ļŖÜŌ┼õ╝■ųŲįņ╣żą“░³└©ŃTĮėĪóē║ŠĆĪó³c║ĖĪó╣źč└ĪóćŖėĪĪóęŲėĪĪóŅA(y©┤)čb┼õĪó┐éčb┼õĄ╚ĪŻįōÅSčb┼õ▄ćķgėąę╗éĆįŁ┴Žé}ÄņŻ¼Ųõųą░³└©4éĆ┴ó¾wé}ÄņŻ¼3éĆČčČŌÖCŻ¼▄ćķgėą15éĆ╝ė╣ż╣ż╬╗Ż¼ŠÄ╠¢1-15Ż¼▄ćķg│╩Są═Ęų▓╝Ż¼Ęų▓╝▓ĮķL×ķ5├ūŻ¼├┐éĆ╝ė╣ż╣ż╬╗Ū░ėą1┼_ŠĆ▀ģÖCąĄ╩ųŻ¼6┼_╝ż╣Ōę²ī¦(d©Żo)╩ĮAGVĪŻAGVžōž¤(z©”)įŁ┴Ž║═į┌ųŲŲĘĄ─┼õ╦═ĪŻįō▄ćķgéĆ░ß▀\įO(sh©©)éõģóöĄ(sh©┤)╚ń▒Ē1╦∙╩ŠŻ¼Ė„╣żū„šŠ³cķgĄ─▄ć▌vąą±éĢrķg╚ń▒Ē2╦∙╩ŠŻ¼0▒Ē╩ŠįŁ┴Žé}ÄņŻ¼Ė„╝ė╣ż╣ż╬╗ķgĄ─ŠÓļx╚ń▒Ē2╦∙╩ŠĪŻ
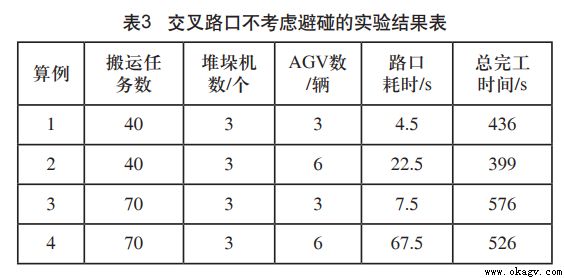
▒Š╬─ęį╣╠Č©Ą─░ß▀\╚╬äš(w©┤)öĄ(sh©┤)║═╣╠Č©╩╣ė├Ą─AGVöĄ(sh©┤)Ęųäe▀MąąīŹ“ׯ¼▓óĘųäe┐╝æ]į┌Į╗▓µ┬Ę┐┌▒▄┼÷║═▓╗┐╝æ]▒▄┼÷Ą─ā╔ĘNŪķør▀Mąąī”ššĪŻ╦Ń└²1░ß▀\╚╬äš(w©┤)×ķ40Ż¼ČčČŌÖCöĄ(sh©┤)3Ż¼AGVöĄ(sh©┤)×ķ3Ż╗╦Ń└²2░ß▀\╚╬äš(w©┤)×ķ40Ż¼ČčČŌÖCöĄ(sh©┤)3Ż¼AGVöĄ(sh©┤)×ķ6Ż╗╦Ń└²3░ß▀\╚╬äš(w©┤)×ķ70Ż¼ČčČŌÖCöĄ(sh©┤)3Ż¼AGVöĄ(sh©┤)×ķ3Ż╗╦Ń└²4░ß▀\╚╬äš(w©┤)×ķ70Ż¼ČčČŌÖCöĄ(sh©┤)3Ż¼AGVöĄ(sh©┤)×ķ6ĪŻ
▒Ē1▄ćķT░ß▀\įO(sh©©)éõīŹļHģóöĄ(sh©┤)▒Ē
▒Ē2 Ė„╣żū„šŠ³cķgŠÓļx▒Ē
īŹ“×ĮY(ji©”)╣¹╚ń▒Ē3╦∙╩ŠŻ¼░ß▀\╚╬äš(w©┤)öĄ(sh©┤)ŽÓ═¼ĢrŻ¼AGVį┌Į╗▓µ┬Ę┐┌Ą─║─Ģr┼cAGVöĄ(sh©┤)┴┐│╔š²▒╚Ż¼┐é═Ļ╣żĢrķg┼cAGVöĄ(sh©┤)┴┐│╔Ę┤▒╚ĪŻAGVöĄ(sh©┤)┴┐ŽÓ═¼ĢrŻ¼AGVį┌Į╗▓µ┬Ę┐┌Ą─║─Ģr║═┐é═Ļ╣żĢrķgŠ∙┼c░ß▀\╚╬äš(w©┤)öĄ(sh©┤)│╔š²▒╚Ż¼╝┤╣╠Č©AGVĄ─╩╣ė├öĄ(sh©┤)┴┐Ż¼░ß▀\╚╬äš(w©┤)įĮČÓŻ¼AGVį┌Į╗▓µ┬Ę┐┌Ą─║─Ģr║═┐é═Ļ╣żĢrķgČ╝ļSų«į÷╝ėĪŻ
1Ż®Į╗▓µ┬Ę┐┌┐╝æ]▒▄┼÷
īŹ“×ĮY(ji©”)╣¹╚ń▒Ē4╦∙╩ŠŻ¼┐╝æ]AGVį┌Į╗▓µ┬Ę┐┌Ą─▒▄┼÷ŪķørŻ¼├┐éĆ╦Ń└²ųąAGVį┌┬Ę┐┌Ą─Ą╚┤²║─ĢrŠ∙ėą▓╗═¼│╠Č╚Ą─£p╔┘Ż¼ļSų°AGVöĄ(sh©┤)┴┐╗“š▀░ß▀\╚╬äš(w©┤)öĄ(sh©┤)┴┐Ą─į÷╝ėŻ¼
▒Ē3 Į╗▓µ┬Ę┐┌▓╗┐╝æ]▒▄┼÷Ą─īŹ“×ĮY(ji©”)╣¹▒Ē
AGVį┌┬Ę┐┌Ą─┼÷ū▓┐╔─▄ąįį÷╝ėŻ¼╩╣Ą├AGVį┌┬Ę┐┌Ą─Ą╚┤²║─Ģr£p╔┘ą¦╣¹▌^×ķ├„’@ĪŻ
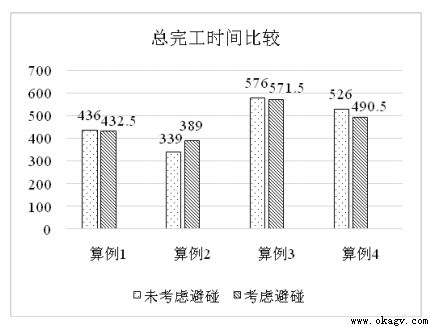
īóį┌Į╗▓µ┬Ę┐┌▓╗┐╝æ]▒▄┼÷ęÄ(gu©®)ät║═┐╝æ]▒▄┼÷ęÄ(gu©®)ätā╔ĘNŪķør▀Mąąī”▒╚Ż¼╚ńłD6║═łD7╦∙╩ŠŻ¼╦Ń└²1-4į┌┐╝æ]▒▄┼÷ęÄ(gu©®)ätŽ┬Ż¼┬Ę┐┌Ą╚┤²Ģrķg║═┐é═Ļ╣żĢrķgČ╝ėąę╗Č©│╠Č╚Ą─£p╔┘Ż¼╝┤į┌┐╝æ]Į╗▓µ┬Ę┐┌▒▄┼÷Ą─ŪķørŽ┬Ż¼ČÓįO(sh©©)éõģf(xi©”)═¼ū„śI(y©©)Ą─┐é═Ļ╣żĢrķgĪó┬Ę┐┌Ą╚┤²Ģrķg║═ū„śI(y©©)ą¦┬╩Č╝ėą╦∙╠ßĖ▀ĪŻ
▒Ē4 Į╗▓µ┬Ę┐┌┐╝æ]▒▄┼÷Ą─īŹ“×ĮY(ji©”)╣¹▒Ē
2Ż®ĮY(ji©”)╣¹ī”▒╚
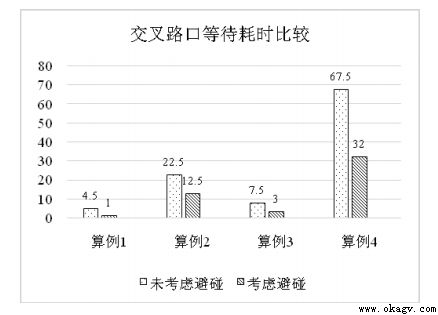
łD6 ā╔ĘNŪķørĄ─Į╗▓µ┬Ę┐┌Ą╚┤²║─ĢrłD
łD7 ā╔ĘNŪķørĄ─┐é═Ļ╣żĢrķgłD
3Ż®╦ŃĘ©ąį─▄▒╚▌^
═©▀^╦Ń└²2īó▒Š╬─Ą─ā×(y©Łu)╗»ūį▀mæ¬(y©®ng)PSO┼cé„Įy(t©»ng)PSO▀Mąą▒╚▌^Ż¼ė╔łD8║═▒Ē5┐╔ų¬Ż¼į┌Ą³┤·│§Ų┌Ż¼╦ŃĘ©┌ģė┌┐ņ╦┘╩šö┐Ż¼į┌25┤·ū¾ėęīżĄ├┤╬ā×(y©Łu)ĮŌĪŻį┌Ą³┤·║¾Ų┌Ż¼╗∙ė┌ūį▀mæ¬(y©®ng)ūā«ÉĖ┼┬╩Ż¼ŲõĖ┼┬╩ųĄį÷┤¾Ż¼╦ŃĘ©Ą─╦č╦„┐šķgĄ├ęįį÷┤¾Ż¼į┌35┤·ū¾ėęšęĄĮ╚½ŠųūŅā×(y©Łu)ĮŌĪŻā×(y©Łu)╗»ūį▀mæ¬(y©®ng)PSOį┌ĮŌĄ─ūā╗»║═ĘN╚║Š∙ųĄĄ─ūā╗»Č╝Ė³×ķĘĆ(w©¦n)Č©Ūę╩šö┐╦┘Č╚Ė³┐ņĪŻ

▒Ē5 ╦ŃĘ©▀\╦ŃĮY(ji©”)╣¹▒╚▌^▒Ē
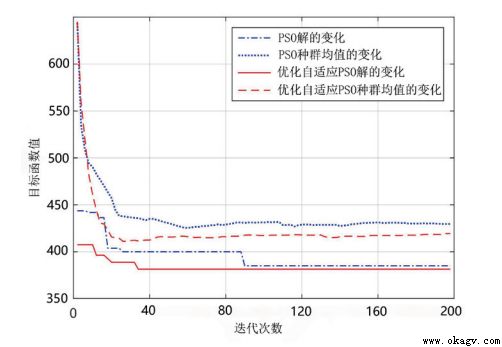
łD8 ─┐ś╦║»öĄ(sh©┤)ūā╗»Ū·ŠĆłD
▒Š╬─ßśī”ųŪ─▄╣żÅSųąČÓ░ß▀\▌d¾wĄ─ģf(xi©”)═¼ū„śI(y©©)å¢Ņ}Ż¼Į©┴óęį┐é?c©©)╬ä?w©┤)═Ļ╣żĢrķgūŅ╔┘×ķų„øQ▓▀─┐ś╦║═ęįæ═┴P│╔▒ŠūŅĄ═×ķ▌oų·øQ▓▀─┐ś╦Ą─ģf(xi©”)═¼ū„śI(y©©)ā×(y©Łu)╗»─Żą═ĪŻ┐╝æ]AGVį┌Į╗▓µ┬Ę┐┌Ą─▒▄┼÷ęÄ(gu©®)ätŻ¼AGVį┌Öz£yęį╗ź╚▌║═▓╗╚▌ā╔ĘNŽÓ╬╗┼ąöÓČÓ▌vAGV╩Ūʱ┐╔ęį═¼Ģrį┌Į╗▓µ┬Ę┐┌═©ąąŻ¼ßśī”╠Äė┌▓╗╚▌ŽÓ╬╗Ą─AGVŻ¼═©▀^äėæB(t©żi)š{(di©żo)š¹ąą▄ćā×(y©Łu)Ž╚╝ēęÄ(gu©®)ätŻ¼ęįūŅ┤¾│╠Č╚╔Ž▒ŻūC╚╬äš(w©┤)ł╠(zh©¬)ąąĄ─£╩ĢrąįĪŻģf(xi©”)═¼ū„śI(y©©)─Żą═▓╔ė├ā×(y©Łu)╗»PSO╦ŃĘ©Ū¾ĮŌŻ¼×ķ▒▄├Ōį┌Ą³┤·║¾Ų┌Ž▌╚ļŠų▓┐ūŅā×(y©Łu)Ż¼ę²╚ļ▀zé„╦ŃĘ©ųąĄ─ūį▀mæ¬(y©®ng)ūā«ÉŻ¼į÷ÅŖ╦ŃĘ©╦č╦„ĮŌĄ─ŠSČ╚┐šķgĪŻęįļŖÜŌ┼õ╝■ųŲįņčb┼õ▄ćķg×ķīŹ└²Ż¼ęį┐žųŲūā┴┐Ę©ī”į┌Į╗▓µ┬Ę┐┌┐╝æ]▒▄┼÷ęÄ(gu©®)ät║═▓╗┐╝æ]▒▄┼÷▀Mąąī”▒╚Ż¼ĮY(ji©”)╣¹▒Ē├„į┌┬Ę┐┌Ą╚┤²Ģrķg║═┐é═Ļ╣żĢrķg╔ŽŻ¼┐╝æ]▒▄┼÷ęÄ(gu©®)ätĄ─ĮY(ji©”)╣¹Č╝ā×(y©Łu)ė┌▓╗┐╝æ]▒▄┼÷Ą─ŪķørĪŻīóā×(y©Łu)╗»PSO╦ŃĘ©║═é„Įy(t©»ng)PSO▀Mąą═¼─Żą══¼╦Ń└²ī”▒╚Ż¼ĮY(ji©”)╣¹▒Ē├„į┌ūŅā×(y©Łu)ĮŌĪóĘN╚║ūŅā×(y©Łu)ĮŌŠ∙ųĄ║═╩šö┐┤╬öĄ(sh©┤)╔Žā×(y©Łu)╗»ūį▀mæ¬(y©®ng)PSO╦ŃĘ©│╩▌^×ķ├„’@ā×(y©Łu)ä▌ĪŻ
[1] ĻÉ├¶,└Ķš╣╠Ž,ĻÉæcą┬,Ą╚.┐╝æ]ėąŽ▐╬’┴„▀\▌ö─▄┴”Ą─ųŪ─▄▄ćķgAGVš{(di©żo)Č╚╦Ńʩ蹊┐[J].╣żśI(y©©)╣ż│╠,2019,22(4):49-57.
[2] ┘RķLš„,╦╬įź┤©,└ūń∙,Ą╚.╚ßąįū„śI(y©©)▄ćķgČÓūįäėī¦(d©Żo)ę²ąĪ▄ć║═ÖCŲ„Ą─╝»│╔š{(di©żo)Č╚[J].ųąć°ÖCąĄ╣ż│╠,2019,30(4):438-447.
[3] äóą±,śŪ┼Õ╗═,ÕXĢį├„,Ą╚.╗∙ė┌Ė─▀M▀zé„╦ŃĘ©Ą─╬’┴Ž┼õ╦═ČÓAGVš{(di©żo)Č╚ā×(y©Łu)╗»[J].ÖCąĄįO(sh©©)ėŗ┼cųŲįņ╣ż│╠,2015,44(3):16-21.
[4] į└ą”║¼,įSĢįĮĪ,═§Ž¬▓©.├µŽ“FMS╗∙ė┌Ė─▀MĄ─╗ņ║ŽPSO-GAĄ─ČÓAGVš{(di©żo)Č╚╦Ńʩ蹊┐[J].ėŗ╦ŃÖC┐ŲīW(xu©”),2018,45(S2):167-171.
[5] Abdelmaguid T F, Nassef A O, Kamal B A, et al. A hybrid GA/heuristic approach to the simultaneous scheduling of machines and automated guided vehicles[J].International journal of production research,2014,42(2):267-281.
[6] ║·Į▄Į▄.├µŽ“ųŲįņ▄ćķg╚ßąį╬’┴„Ą─AGV╚║┐žŽĄĮy(t©»ng)čąųŲ[D].▒▒Š®Ó]ļŖ┤¾īW(xu©”),2019.
[7] ąż├╚.╗∙ė┌╗ņ║Ž▀zé„╦ŃĘ©Ą─ļŖ┴”įO(sh©©)éõÖz£y╚ßąįš{(di©żo)Č╚蹊┐[D].╬õØh└Ē╣ż┤¾īW(xu©”),2018.
[8] ąż║ŻīÄ,śŪ┼Õ╗═.ūįäėī¦(d©Żo)ę²▄接Įy(t©»ng)▒▄┼÷╝░Łh(hu©ón)┬Ę╦└µi┐žųŲĘĮĘ©[J].ėŗ╦ŃÖC╝»│╔ųŲįņŽĄĮy(t©»ng),2015,21(05):1244-1252.
[9] å╠Är,ÕXĢį├„,śŪ┼Õ╗═.╗∙ė┌Ė─▀MĢrķg┤░Ą─AGVs▒▄┼÷┬ĘÅĮęÄ(gu©®)äØ[J].ėŗ╦ŃÖC╝»│╔ųŲįņŽĄĮy(t©»ng),2012,18(12):2683-2688.
[10] Belhaiza S, Hansen P, Laporte G. A hybrid variable neighborhood tabu search heuristic for the vehicle routing problem with multiple time windows[J].Computers & Operations Research,2014,52:269-281.
[11] Belhaiza S. A game theoretic approach for the real-life multiplecriterion vehicle routing problem with multiple time windows[J]. IEEE Systems Journal, 2016,12(2):1251-1262.
[12] Lau H Y K, Zhao Y. Integrated scheduling of handling equipment at automated container terminals[J].International journal of production economics, 2008,112(2):665-682.
[13] └ŅšõŽ¦.╗∙ė┌╝ż╣Ōī¦(d©Żo)║ĮAGV┬ĘÅĮęÄ(gu©®)äØ┼c▒▄šŽ╦ŃĘ©Ą─蹊┐[D].╬„░▓┐Ų╝╝┤¾īW(xu©”),2019.
[14] Mousavi M, Yap H J, Musa S N, et al. Multi-objective AGV scheduling in an FMS using a hybrid of genetic algorithm and particle swarm optimization[J]. PloS one,2017,12(3):e0169817.
[15] Ma Y, Xu J. A cloud theory-based particle swarm optimization for multiple decision maker vehicle routing problems with fuzzy random time windows[J].Engineering Optimization,2015,47(6): 825-842╬─š┬üĒį┤ė┌AGV░╔
╔Žę╗ŚlŻ║AGVį┌BEVŲ¹▄ć║¾ś“čb┼õŠĆųąĄ─æ¬(y©®ng)ė├įO(sh©©)ėŗ Ž┬ę╗ŚlŻ║╗∙ė┌─Ż║² PIDĄ─AGV▐D(zhu©Żn)╦┘┐žųŲŽĄĮy(t©»ng)įO(sh©©)ėŗ
ļŖįÆŻ║0755-29851810
é„šµŻ║0755-27307147
Q QŻ║2448209188
Ó]ŽõŻ║zfj@okagv.com
ĄžųĘŻ║╔Ņ█┌╩ąīÜ░▓ģ^(q©▒)ĖŻ║ŻĮųĄ└┤¾č¾┬Ęųą╝ZĖŻ░▓ÖCŲ„╚╦┐Ų╝╝ł@14ŚØ

Copyright © 2012-2023 ╔Ņ█┌╩ąÜWµzųŪ─▄ÖCŲ„╚╦╣╔Ę▌ėąŽ▐╣½╦Š ░µÖÓ(qu©ón)╦∙ėąĪĪ ╗øICPéõ 19115608 ╠¢ĪĪxml sitemap
┬ō(li©ón)ŽĄļŖįÆ
400-007-3860QQū╔įā
2448209188╬óą┼
╬óą┼ū╔įā