īŻśI╠ß╣®é}ā”╬’┴„╔²╝ēĖ─įņĪó¤o╚╦░ß▀\ÖCŲ„╚╦«aŲĘ
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860





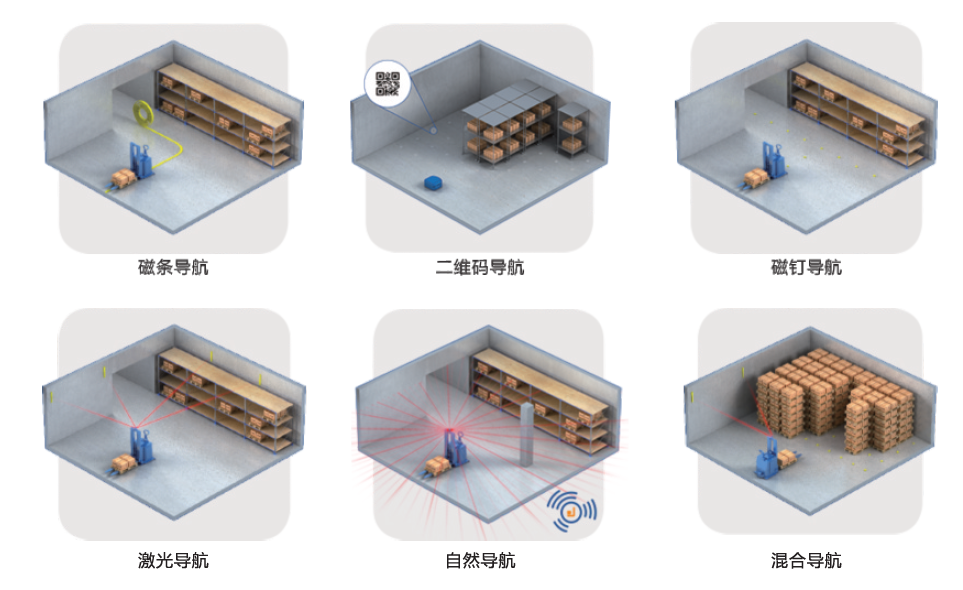
AGVī¦ę²╝░Č©╬╗╝╝ągŻ║
ū„×ķAGV╝╝ąg蹊┐Ą─║╦ą─▓┐ĘųŻ¼ī¦ę²╝░Č©╬╗╝╝ągĄ─ā×┴ėīóų▒ĮėĻPŽĄų°AGVĄ─ąį─▄ĘĆČ©ąįĪóūįäė╗»│╠Č╚╝░æ¬ė├īŹė├ąįŻ¼▒Ē1×ķAGVĄ─│ŻęŖī¦ę²╝░Č©╬╗╝╝ągĪŻ
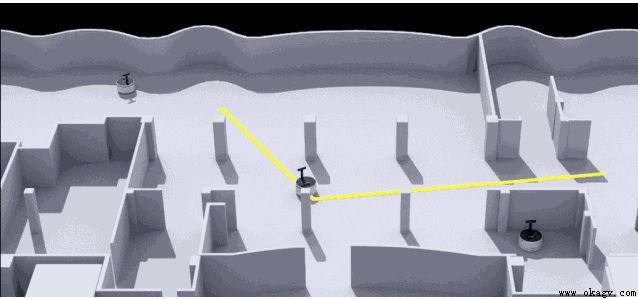
AGV┬ĘÅĮęÄäØ║═╚╬äšš{Č╚╝╝ągŻ║
1.ąą±é┬ĘÅĮęÄäØĪŻąą±é┬ĘÅĮęÄäØ╩ŪųĖĮŌøQAGVÅ─│÷░l³cĄĮ─┐ś╦³cĄ─┬ĘÅĮå¢Ņ}Ż¼╝┤Ī░╚ń║╬╚źĪ▒Ą─å¢Ņ}ĪŻ¼FļAČ╬ć°ā╚═ŌęčĮøėą┤¾┴┐Ą─╚╦╣żųŪ─▄╦ŃĘ©▒╗æ¬ė├ė┌AGVąą±é┬ĘÅĮęÄäØųąŻ¼╚ńŽü╚║╦ŃĘ©Īó▀zé„╦ŃĘ©ĪółDšōĘ©Īó╠ōöM┴”Ę©Īó╔±ĮøŠWĮj║═A*╦ŃĘ©Ą╚ĪŻ
2.ū„śI╚╬äšš{Č╚ĪŻū„śI╚╬äšš{Č╚╩ŪųĖĖ∙ō■«öŪ░ū„śIĄ─šłŪ¾ī”╚╬äš▀Mąą╠Ä└ĒŻ¼░³└©ī”╗∙ė┌ę╗Č©ęÄätĄ─╚╬äš▀Mąą┼┼ą“▓ó░▓┼┼║Ž▀mĄ─AGV╠Ä└Ē╚╬䚥╚ĪŻąĶꬊC║Ž┐╝æ]Ė„éĆAGVĄ─╚╬äšł╠ąą┤╬öĄĪóļŖ─▄╣®æ¬ĢrķgĪó╣żū„┼c┐šķeĢrķgĄ╚ČÓéĆę“╦žŻ¼ęį▀_ĄĮ┘Yį┤Ą─║Ž└Ēæ¬ė├║═ūŅā×Ęų┼õĪŻ
3.ČÓÖCģfš{╣żū„ĪŻČÓÖCģfš{╣żū„╩ŪųĖ╚ń║╬ėąą¦└¹ė├ČÓéĆAGV╣▓═¼═Ļ│╔─│ę╗Å═ļs╚╬䚯¼▓óĮŌøQ▀^│╠ųą┐╔─▄│÷¼FĄ─ŽĄĮyø_═╗Īó┘Yį┤ĖéĀÄ║═╦└µiĄ╚ę╗ŽĄ┴ąå¢Ņ}ĪŻ¼Fį┌│Żė├Ą─ČÓÖCģfš{ĘĮĘ©░³└©Ęų▓╝╩Įģfš{┐žųŲĘ©ĪóĄ└┬ĘĮ╗═©ęÄät┐žųŲĘ©Īó╗∙ė┌ČÓųŪ─▄¾w└Ēšō┐žųŲĘ©║═╗∙ė┌PetriŠW└ĒšōĄ─ČÓÖCŲ„╚╦┐žųŲĘ©ĪŻ

AGV▀\äė┐žųŲ╝╝ągŻ║
▓╗═¼Ą─▄ć▌åÖCśŗ║═▓╝Šųėąų°▓╗═¼Ą─▐DŽ“║═┐žųŲĘĮ╩ĮŻ¼¼FļAČ╬AGVĄ─▐DŽ““īäėĘĮ╩Į░³└©╚ńŽ┬ā╔ĘNŻ║ā╔▌å▓Ņ╦┘“īäė▐DŽ“ĘĮ╩ĮŻ¼╝┤īóā╔¬Ü┴ó“īäė▌å═¼▌SŲĮąąĄž╣╠Č©ė┌▄ć¾wųą▓┐Ż¼Ųõ╦³Ą─ūįė╔╚fŽ“▌åŲõų¦ō╬ū„ė├Ż¼┐žųŲŲ„═©▀^š{╣Øā╔“īäė▌åĄ─▐D╦┘║═▐DŽ“Ż¼┐╔ęįīŹ¼F╚╬ęŌ▐DÅØ░ļÅĮĄ─▐DŽ“Ż╗▓┘ȵ▌å┐žųŲ▐DŽ“ĘĮ╩ĮŻ¼╝┤═©▀^┐žųŲ▓┘ȵ▌åĄ─Ų½║ĮĮŪīŹ¼F▐DÅØŻ¼Ųõ┤µį┌ūŅąĪ▐DÅØ░ļÅĮĄ─Ž▐ųŲĪŻ

┐žųŲŽĄĮy═©▀^░▓čbį┌“īäė▌S╔ŽĄ─ŠÄ┤aŲ„Ę┤üüĒĮM│╔ę╗éĆķ]ŁhŽĄĮyŻ¼─┐Ū░╗∙ė┌ā╔▌å▓Ņ╦┘“īäėĄ─AGV┬ĘÅĮĖ·█ÖĘĮĘ©ų„ę¬ėąŻ║PID┐žųŲĘ©ĪóūŅā×ŅA£y┐žųŲĘ©ĪóīŻ╝ꎥĮy┐žųŲĘ©Īó╔±ĮøŠWĮj┐žųŲĘ©║═─Ż║²┐žųŲĘ©ĪŻ
AGVą┼Žó╚┌║Ž╝╝ągŻ║
ą┼Žó╚┌║Ž╩ŪųĖ└¹ė├ČÓį┤ą┼ŽóĄ─ĻP┬ōĮM║ŽŻ¼│õĘųūRäeĪóĘų╬÷Īó╣└ėŗ║═š{Č╚öĄō■Ż¼═Ļ│╔Ž┬▀_øQ▓▀║═Š½┤_╠Ä└Ēą┼ŽóĄ─╚╬䚯¼▓óī”ų▄ć·ŁhŠ│ĪóæørĄ╚▀Mąą▀mČ╚Ą─╣└ėŗĪŻ─┐Ū░Ż¼į┌ī¦ę²ŅIė“蹊┐║═æ¬ė├Ą─ą┼Žó╚┌║Ž╝╝ągų„ę¬ėąKalman×V▓©ĪóžÉ╚~╦╣╣└ėŗĘ©┼cD-SūCō■═Ų└ĒĄ╚Ż¼ŲõųąęįKalman×V▓©ūŅÅVĪŻ
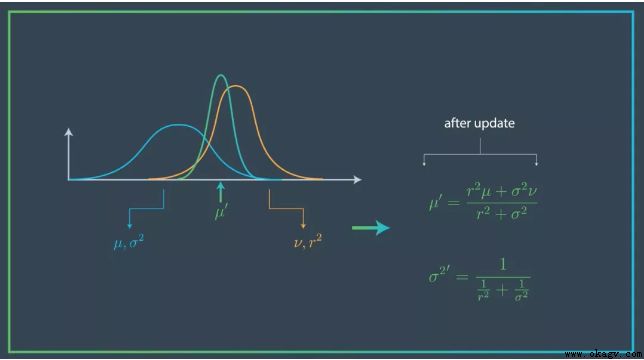
Kalman×V▓©Š▀ėą┴╝║├Ą─īŹĢrąįŻ¼Ą½╦³╩ŪĮ©┴óį┌ć└Ė±Ą─öĄīW─Żą═Ą─╗∙ĄA╔ŽŻ¼«öī¦ę²─Żą═┤µį┌▌^┤¾Į©─Żš`▓Ņ╗“š▀ŽĄĮy╠žąį░l╔·ūā╗»Ģr═∙═∙Ģ■ī¦ų┬×V▓©░l╔óĪŻ×ķ╠ßĖ▀×V▓©╦ŃĘ©Ą─¶ö░¶ąį║═ūį▀mæ¬─▄┴”Ż¼┐╔ßśī”AGVĄ─ī¦ę²ę¬Ū¾┼c╠ž³cŻ¼čąŠ┐▀m«öĄ─ūį▀mæ¬Kalman×V▓©╦ŃĘ©Īó¶ö░¶×V▓©╦ŃĘ©╗“ųŪ─▄×V▓©Ż©╚ń─Ż║²═Ų└ĒĪó╔±ĮøŠWĮjĪóīŻ╝ꎥĮyŻ®ĘĮĘ©Ą╚ĪŻ
╔Žę╗ŚlŻ║4ĘNų„┴„AGVī¦║ĮĘĮ╩Įā×╚▒³cī”▒╚ĮķĮB Ž┬ę╗ŚlŻ║▓µ▄ć╩ĮAGV─Ż║²┐žųŲŽĄĮyĄ─įOėŗ┼cįć“×蹊┐
ļŖįÆŻ║0755-29851810
é„šµŻ║0755-27307147
Q QŻ║2448209188
Ó]ŽõŻ║zfj@okagv.com
ĄžųĘŻ║╔Ņ█┌╩ąīÜ░▓ģ^ĖŻ║ŻĮųĄ└┤¾č¾┬Ęųą╝ZĖŻ░▓ÖCŲ„╚╦┐Ų╝╝ł@14ŚØ

Copyright © 2012-2023 ╔Ņ█┌╩ąÜWµzųŪ─▄ÖCŲ„╚╦╣╔Ę▌ėąŽ▐╣½╦Š ░µÖÓ╦∙ėąĪĪ ╗øICPéõ 19115608 ╠¢ĪĪxml sitemap
┬ōŽĄļŖįÆ
400-007-3860QQū╔įā
2448209188╬óą┼
╬óą┼ū╔įā