īŻśI╠ß╣®é}ā”╬’┴„╔²╝ēĖ─įņĪó¤o╚╦░ß▀\ÖCŲ„╚╦«aŲĘ
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860





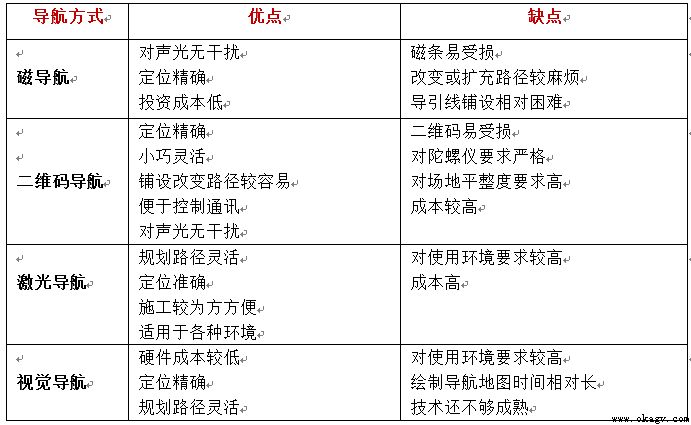
─┐Ū░4ĘNų„┴„AGVī¦║ĮĘĮ╩ĮŻ©┤┼Ślī¦║ĮĪóČ■ŠS┤aī¦║ĮĪó╝ż╣Ōī¦║ĮĪóSLAMęĢėXī¦║ĮŻ®į┌╩ął÷╔ŽęčĮøæ¬ė├Ą─║▄ČÓ┴╦Ż¼Č╝ėąų°Č©╬╗Š½┤_Ą─ā׳cŻ¼Ą½╩Ūį┌│╔▒ŠĘĮ├µŻ¼┤┼ī¦║Į║═Č■ŠS┤aī¦║Į│╔▒ŠŽÓī”Ą═ą®Ż¼Č°Ųõ╦¹ā╔ĘNĘĮ╩Į│╔▒ŠŽÓī”Ė▀Ż¼Č°╝ż╣Ōī¦║ĮĄ─╝ż╣Ōé„ĖąŲ„ārĖ±ę▓▒╚▌^Ė▀ĪŻ
ĪĪĪĪČ°į┌┬ĘÅĮęÄäØņ`╗ŅČ╚ĘĮ├µŻ¼┤┼ī¦║ĮĄ─ņ`╗ŅČ╚╩ŪūŅĄ═Ą─Ż¼ę“×ķ┤┼ī¦║Įę¬Ė─ūā┬ĘÅĮęŌ╬Čų°Ąž╔ŽĄ─┤┼ī¦ŠĆ╗“┤┼Ślę¬Ė─ūāŻ¼▒╚▌^┬ķ¤®Ż¼Č■ŠS┤aī¦║ĮŽÓī”ņ`╗Ņą®Ż¼Ė─ūā┬ĘÅĮ▌^╚▌ęūŻ¼Č°╝ż╣ŌSLAMī¦║Į║═ęĢėXSLAMī¦║Įät╩ŪūŅņ`╗ŅĄ─Ż¼ī┘ė┌¤o▄ēī¦║ĮĪŻ
ĪĪĪĪęį╔ŽÄūĘNAGVī¦║Į░lš╣ėąŽ╚ėą║¾Ż¼Č╝ėąĖ„ūįĄ─╚▒³c║═ā×ä▌Ż¼╦∙ęįÅ─īŹļHĄ─╩╣ė├ł÷Š░│÷░lŻ¼╦¹éāĖ„ėą╩ął÷ĪŻĄ½╩ŪŻ¼╬┤üĒšlĢ■╩Ūų„┴„Ą─AGVī¦║ĮĘĮ╩Į─žŻ┐
ĪĪĪĪ┤┼ī¦║Įė┌╚š▒ŠŠ┼╩«─Ļ┤·Š═┤¾ęÄ─Ż┼dŲ┴╦Ż¼╝ė╔Ž┤┼ī¦║Į╝╝ągķTÖæĄ═Ż¼┤·┤aėųķ_į┤Ż¼╦∙ęįį┌ć°ā╚░lš╣Ą─ĢrķgūŅŠ├ĪŻ▓╗▀^Ż¼┤┼ī¦║ĮAGV│╔▒ŠĄ═Ż¼ąį─▄ę╗░ŃŻ¼╩ŪŽÓī”Ą═Č╦Ą─AGVŻ¼ę¬Ū¾▌^Ė▀Ą─æ¬ė├ł÷Š░Ż¼Č╝▓╗Ģ■ė├╦³ĪŻ
ĪĪĪĪ╬┤üĒŻ¼ļSų°╩ął÷ę¬Ū¾Ą─▀Mę╗▓Į╠ßĖ▀Ż¼┴¶Įo┤┼ī¦║ĮAGVĄ─┐šķgų╗Ģ■įĮüĒįĮąĪĪŻ
ĪĪĪĪ─┐Ū░Ż¼AGVī¦║Į╝╝ągčą░lų„ę¬╝»ųąį┌Č■ŠS┤aī¦║ĮĪó╝ż╣ŌSLAMī¦║Į║═ęĢėXSLAMī¦║Į╔ŽŻ¼╬┤üĒ░lš╣ę▓īóęį▀@╚²ĘNī¦║ĮĘĮ╩Į×ķų„ĪŻ
ĪĪĪĪČ■ŠS┤aī¦║Įį┌╩ął÷╔ŽĄ─╗▒¼ļx▓╗ķ_Č■ŠS┤aī¦║ĮÖCŲ„╚╦KivaŻ¼╦³ė┌2012─Ļ▒╗üå±R▀dęį7.75ā|├└į¬Ą─Ė▀ār╩š┘ÅŻ¼╦▓ķg▒╗╩└Įń╦∙╩ņų¬ĪŻKiva▒╗ūuĘQ×ķ╩└Įń╔ŽūŅ│╔╣”Ą─AGVįOėŗŻ¼Č©ųŲĄ─ļpözŽ±ÖC│╔Ž±─ŻēK╩ŪKivaŽĄĮyĄ─ĻPµIįOéõų«ę╗Ż¼ę╗éĆözŽ±Ņ^Ž“Ž┬┐┤Ąž├µęįūRäeé}ÄņĄž░Õ╔ŽĄ─Č■ŠS┤aŻ¼┴Ēę╗éĆŽ“╔Ž┐┤žø╝▄Ą─Ąū▓┐ĪŻ├┐éĆözŽ±Ņ^Č╝┼õéõ6éĆ╝t╔½LEDė├ė┌šš├„ĪŻŖAį┌ā╔éĆözŽ±ÖCų«ķgĄ─╩ŪłDŽ±╠Ä└Ē─ŻēKŻ¼─▄═©▀^Ė▀╦┘┤«┐┌½@╚ĪöĄō■Ż¼▀MąąöĄō■ŠžĻćÖz£yĪŻ
ĪĪĪĪKiva▀@ĘNŅÉ╦ŲŲÕ▒PĄ─╣żū„─Ż╩Į┴Ņ╚╦ĘŪ│ŻėĪŽ¾╔Ņ┐╠Ż¼ė┌╩ŪŻ¼ć°ā╚Ą─ļŖ╔╠Ż¼ųŪ─▄é}Äņę▓╝Ŗ╝Ŗą¦Ę┬Ż¼▓╔ė├Č■ŠS┤aī¦║ĮAGVŻ¼▀MČ°┤┘▀M┴╦Č■ŠS┤aī¦║ĮAGVĄ─░lš╣ĪŻ
ĪĪĪĪ▓╗▀^Ż¼Č■ŠS┤aī¦║Įę¬Ū¾ĒŚ─┐¼Fł÷õüįO┤¾┴┐Č■ŠS┤aŻ¼Č°Č■ŠS┤aęū─źōpŻ¼ŠSūo│╔▒Š▌^Ė▀Ż¼╦∙ęįŻ¼Č■ŠS┤aŽļę¬ķL╩ó▓╗╦ź│ų└mš╝ō■┤¾▓┐Ęų╩ął÷╩Ū▒╚▌^ļyĄ─Ż¼ė╚Ųõ╩Ūį┌╝ż╣Ōé„Ėą╝╝ąg║═ęĢėXé„Ėą╝╝ąg╚šØu░lš╣│╔╩ņĄ─ŪķørŽ┬ĪŻ
ĪĪĪĪ¼Fį┌╝ż╣ŌSLAMī¦║Į║═ęĢėXSLAMī¦║ĮĄ─ąį─▄įĮüĒįĮ║├┴╦Ż¼║▄ČÓ╚╦ķ_╩╝ųžęĢ╝░┐┤║├SLAMī¦║ĮŻ¼─┐Ū░ę╗ą®é„Įyī¦║ĮAGVę▓ęč▒╗SLAM╦∙╚Ī┤·ĪŻ
ĪĪĪĪSLAMī¦║ĮĄ─ĘĮ╩Į─▄╩╣AGVņ`╗ŅęÄäØ┬ĘÅĮŻ¼Č©╬╗£╩┤_Ż¼ąą±é┬ĘÅĮņ`╗ŅČÓūāŻ¼╩®╣ż▌^×ķĘĮĘĮ▒ŃŻ¼─▄ē“▀mæ¬Ė„ĘNīŹė├ŁhŠ│ĪŻ
ĪĪĪĪĄ½╝ż╣Ōī¦║Į│╔▒Š▌^Ė▀Ż¼ęĢėXī¦║Į└LųŲĄžłDĢrķg▌^ķLŻ¼╦∙ęįį┌─┐Ū░AGV╩ął÷╔ŽŻ¼▀@ā╔ĘNī¦║ĮAGVĄ─š╝ė├┬╩Č╝▓╗╩Ū║▄Ė▀ĪŻ
ĪĪĪĪ▓╗▀^Ż¼ę╗ĘĮ├µŻ¼ļSų°ūįäė±{±éĄ─╗▒¼Ż¼ūįäė±{±éų„ę¬é„ĖąŲ„ų«ę╗Ą─╝ż╣Ōé„ĖąŲ„Ż©ė╚Ųõ╩Ū╝ż╣Ō└ū▀_Ż®ę▓ūāĄ├ŽŃGGŻ¼×ķōīŽ╚ŖZĄ├╩ął÷Ż¼¼FĖ„┤¾é„ĖąŲ„╣½╦Šš²┼¼┴”čą░ląįār▒╚Ė▀Ą─╝ż╣Ōé„ĖąŲ„ĪŻŅAėŗ▓╗Š├║¾Ż¼╝ż╣Ōé„ĖąŲ„Ą─ārĖ±Ģ■ĮĄŽ┬╚źŻ¼ī├Ģr╝ż╣Ōī¦║ĮAGVīóōĒėąĖ³┤¾Ą─ā×ä▌ĪŻ
ĪĪĪĪ┴Ēę╗ĘĮ├µŻ¼ęĢėX╦ŃĘ©š²Ė▀╦┘░lš╣Ż¼ūŅ║├Ą─└²ūėŠ═╩Ū╠ž╦╣└ŁĪŻļSų°ęĢėX╦ŃĘ©Ą─į÷ÅŖŻ¼╬┤üĒęĢėXī¦║ĮĄ─ą¦┬╩Ģ■ļSų«╔Ž╔²Ż¼ęĢėXī¦║ĮAGVæ¬ė├ę▓īóĖ³╝ėÅVĘ║ĪŻ
ĪĪĪĪ╦∙ęįŻ¼SLAMī¦║Į╬┤üĒ┐╔Ų┌ĪŻ
╔Žę╗ŚlŻ║AGV░┤Ōo╣”─▄ĮķĮB Ž┬ę╗ŚlŻ║AGVĄ─║╦ą─╝╝ągėą──ą®Ż┐
ļŖįÆŻ║0755-29851810
é„šµŻ║0755-27307147
Q QŻ║2448209188
Ó]ŽõŻ║zfj@okagv.com
ĄžųĘŻ║╔Ņ█┌╩ąīÜ░▓ģ^ĖŻ║ŻĮųĄ└┤¾č¾┬Ęųą╝ZĖŻ░▓ÖCŲ„╚╦┐Ų╝╝ł@14ŚØ

Copyright © 2012-2023 ╔Ņ█┌╩ąÜWµzųŪ─▄ÖCŲ„╚╦╣╔Ę▌ėąŽ▐╣½╦Š ░µÖÓ╦∙ėąĪĪ ╗øICPéõ 19115608 ╠¢ĪĪxml sitemap
┬ōŽĄļŖįÆ
400-007-3860QQū╔įā
2448209188╬óą┼
╬óą┼ū╔įā